

















ROBO TX ElectroPneumatic
COMPUTING
12
Task 2 - Control program - ROBO Pro Level 2
A light barrier is located at the end of the chute to recognize whether a part is pres-
ent. If so, the gripper arm picks up the part and places it on the color sensor for
recognition of the color. The sensor determines the color.
The part is then placed in the proper box.
Box 1 = white, Box 2 = red and Box 3 = blue.
Tip:
For programming consider the sorting sequence. Here is a little help:
Compressor switches on - Output O3 also for lens tip lamp
▯
Model starts after pressure builds up
▯
The robot arm turns until limit switch I1 is switched; motor turns: counterclockwise
▯
Light barrier check - is part present?
▯
Part picked up and transported to color recognition - pulse counter check C1D
▯
Color checked by color sensor I3
▯
Continued transport and separation according to color - pulse counter C1D
▯
Return to check light barrier - limit switch I1
▯
You can call a finished example program for this task with this symbol.
Color recognition subprogram
In addition to the main program you can also create subprograms in ROBO Pro. These
serve to keep your program structure clear - once written, subprograms can also be
copied into other applications.
Information on what subprograms are and how they can be used is given in the
ROBO Pro help
in Chapter 4. It is important that you switch to level 2 or higher in ROBO
Pro.
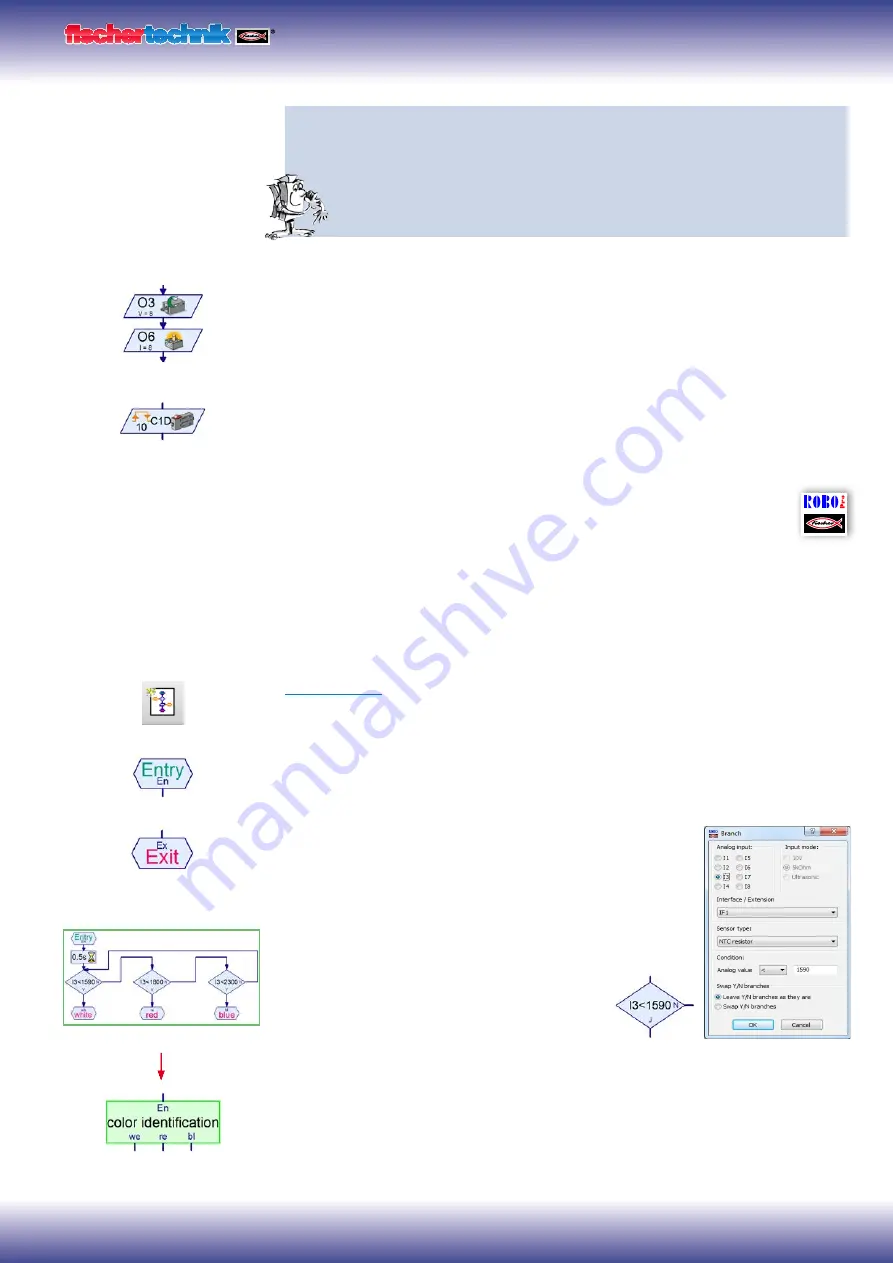
The "color recognition" subprogram provides an example. As defined in the task, the
color is to be recognized and the part then stored according to color. The jump to the
"color recognition" subprogram is shown by a green box in the main program.
Important!
To incorporate a subprogram into a main program,
it is first necessary to write the subprogram.
It may be necessary to adapt the values in the color recogni-
tion subprogram to the values you determined in task 1, so
that the color recognition functions properly.
Button connect to C1 as pulse counter
Start compressor and lamp
color sorting robot.rpp
Output subprogram
Subprogram
Input subprogram
Color recognition subprogram
Symbol for color recognition
subprogram
Summary of Contents for COMPUTING ROBO TX ElectroPneumatic
Page 1: ......







































































