





























CHAPTER 2. USBOARD-USS5
2.7. ROS NODE
2.7.2 Launch
In case of using CAN, the bus needs to be configured first:
sudo ip link set can0 down
sudo ip link set can0 type can bitrate 1000000
sudo ip link set can0 up
To launch the USBoard-USS5 ROS node use:
roslaunch neo_usboard_v2 neo_usboard_v2.launch
2.7.3 Parameters
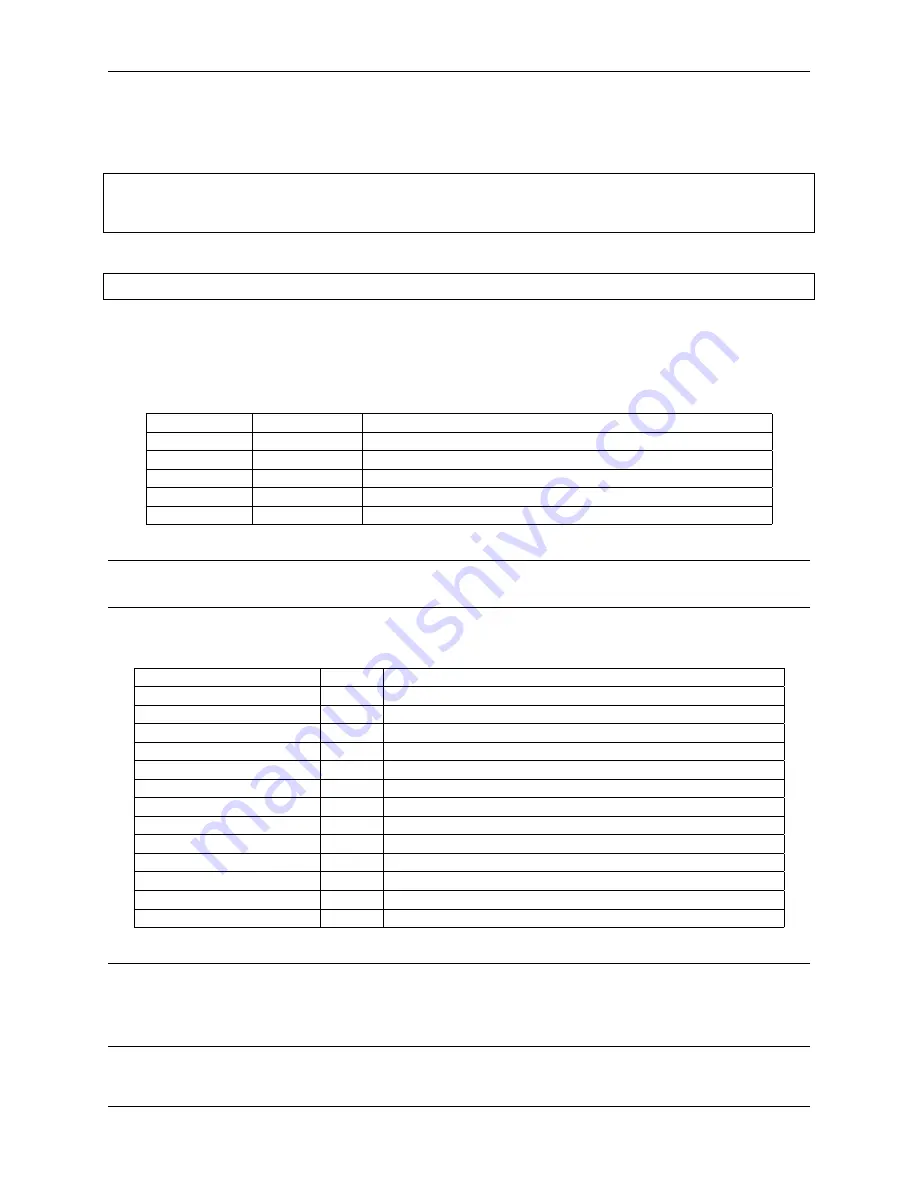
The following parameters can be changed according to your needs in
neo_usboard_v2.yaml
:
Parameter
Value
Note
can_id
1024
Needs to be a multiple of 32.
can_device
None or can0
serial_port
/dev/ttyUSB0
can_baud_rate
1000000 (bit/s)
Needs to match what is configured on the board.
update_rate
5 (Hz)
Relevant only in transmit mode “Request”, see USBoardV2 GUI.
Note:
If
can_device
is set, the CAN bus will be used for communication, otherwise the serial interface specified
in
serial_port
is used.
The following parameters can be changed from the parameter server once the ros node is executed.
Parameter
Value
Note
low_pass_gain
1
low pass filter gain (1 = no filtering)
enable_analog_input
false
if to enable reading analog inputs
enable_legacy_format
false
if to use old message format (when transmitting automatically)
enable_can_termination
false
if to connect CAN bus termination resistance on the board
relay_warn_blocked_invert
false
if to invert warn relay output when a sensor is blocked
relay_alarm_blocked_invert
false
if to invert alarm relay output when a sensor is blocked
active_sensors(0 to 15)
true
Active sensors from 1-16
warn_distance(0 to 15)
100 cm
Warning distances of sensors 1-16
alarm_distance(0 to 15)
30 cm
Alarm distances
enable_transmission(0 to 4)
true
if the group transmits in continuous mode
fire_interval_ms
20 ms
time between pulses
sending_sensor
0
index of the sensor which will send the pulse (cross echo mode)
cross_echo_mode
false
if to enable cross echo mode
Note:
For setting the ros parameters from the application, it is advised to utilize the
/usboard_v2/set_parameters
ser-
vice. If it is required to set the parameters from the command line, then please utilize the
rosrun dynamic_reconfigure
dynparam set param value
command to configure it. Please use the command
ros param list
to see the available
parameters.
24







































































