





























www.nexusrobot.com Robot Kits manual
108
void
debugger
(bool wheelBackDebug=true,bool wheelRightDebug=true,bool wheelLeftDebug=true)
const
Debug the speed of the wheel
Car _state enum
Used to configure the behavior of a car.
Note that not all car can be configured in every state.
Variables:
STAT_UNKNOWN
The state of the car unknown
STAT_STOP
The car’s state is stop
STAT_ADVANCE
The car’s state is moves forward
STAT_BACKOFF
The car’s state is get back off
STAT_RIGHT
The car’s state is turn right
STAT_LEFT
The car’s state is turn left
STAT_ROTATELEFT
The car’s state is moves rotate left
STAT_ROTATERIGHT
The car’s state is moves rotate right
STAT_UPPERLEFT
The car’s state is run upper left
STAT_LOWERLEFT
The car’s state is moves lower left
STAT_LOWERRIGHT
The car’s state is moves lower right
STAT_UPPERRIGHT
The car’s state is moves upper right
Summary of Contents for Nexus Robot
Page 74: ...www nexusrobot com Robot Kits manual 70 Sample Wiring Diagram for RB004 2WD V2 0...
Page 92: ...www nexusrobot com Robot Kits manual 88 Diagram for Omni3WD_V1 0...
Page 96: ...www nexusrobot com Robot Kits manual 92 Diagram_Omni3WD_V3 3...
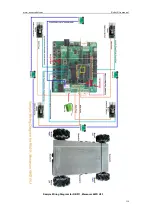
Page 118: ...www nexusrobot com Robot Kits manual 114 Sample Wiring Diagram for RB011 Mecanum 4WD V4 1...































































