





























Robotiq 2-Finger Adaptive Robot Gripper - 200
Instruction Manual
Robotiq inc. © 2008-2013
71
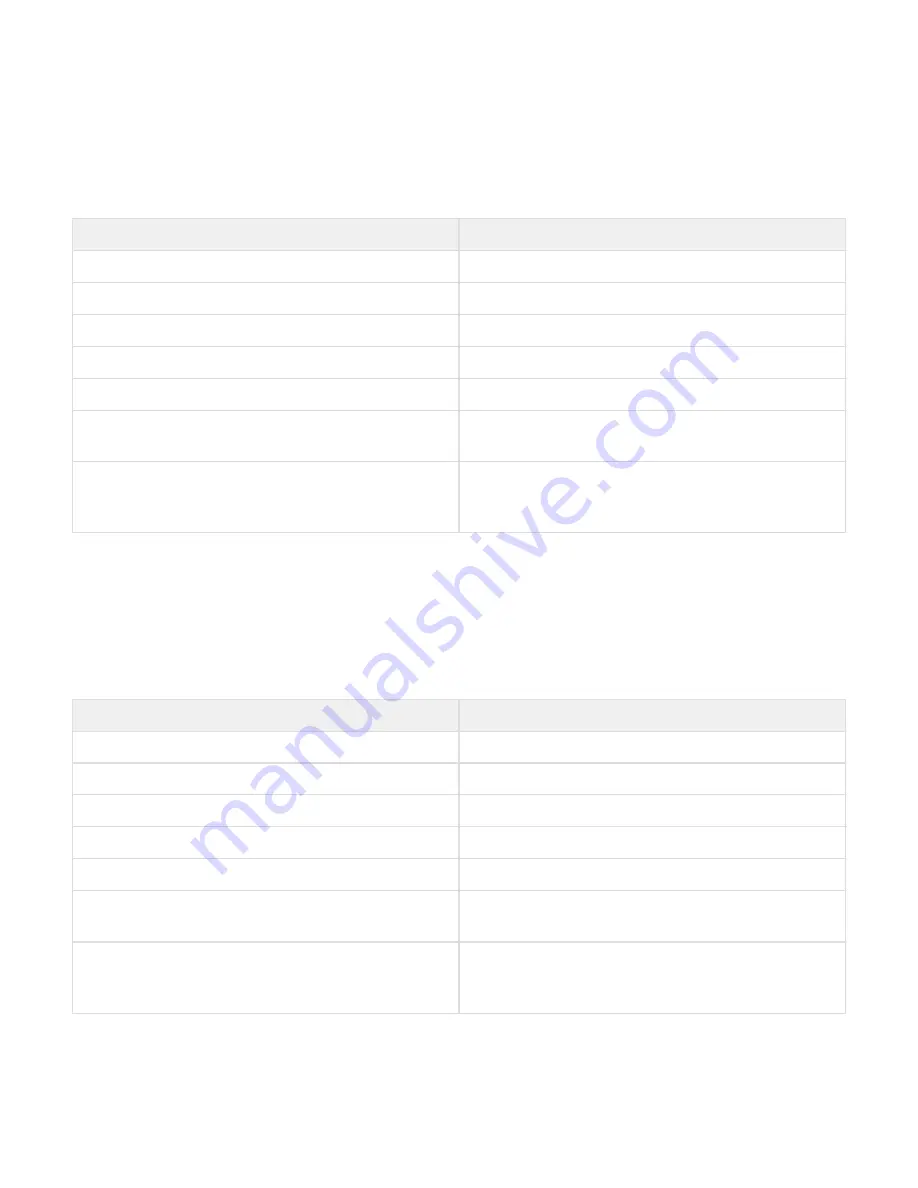
Response (if the activation IS NOT completed):
45 33 00 00 00 05 02 04 02 11 00
where
Bits
Description
4533
Unique transaction identifier (chosen randomly)
0000
Protocol Identifier (Modbus)
0005
Length
02
SlaveID
04
Function Code 04 (Read Input Registers)
02
Number of data bytes to follow (1 registers x 2
bytes/register = 2 bytes)
1100
Content of register 0000 (GRIPPER STATUS = 0x11,
RESERVED = 0x00): gACT = 1 for "Gripper
Activation", gSTA = 1 for "Activation in progress"
Response (if the activation IS completed):
45 33 00 00 00 05 02 04 02 31 00
where
Bits
Description
4533
Unique transaction identifier (chosen randomly)
0000
Protocol Identifier (Modbus)
0005
Length
02
SlaveID
04
Function Code 04 (Read Input Registers)
02
Number of data bytes to follow (1 registers x 2
bytes/register = 2 bytes)
3100
Content of register 0000 (GRIPPER STATUS = 0x31,
RESERVED = 0x00): gACT = 1 for "Gripper
Activation", gSTA = 3 for "Activation is completed"
Step 3: Move the robot to the pick-up location







































































