





























2F-85 & 2F-140 - Instruction Manual
4.3. Robot Output Registers & Functionalities
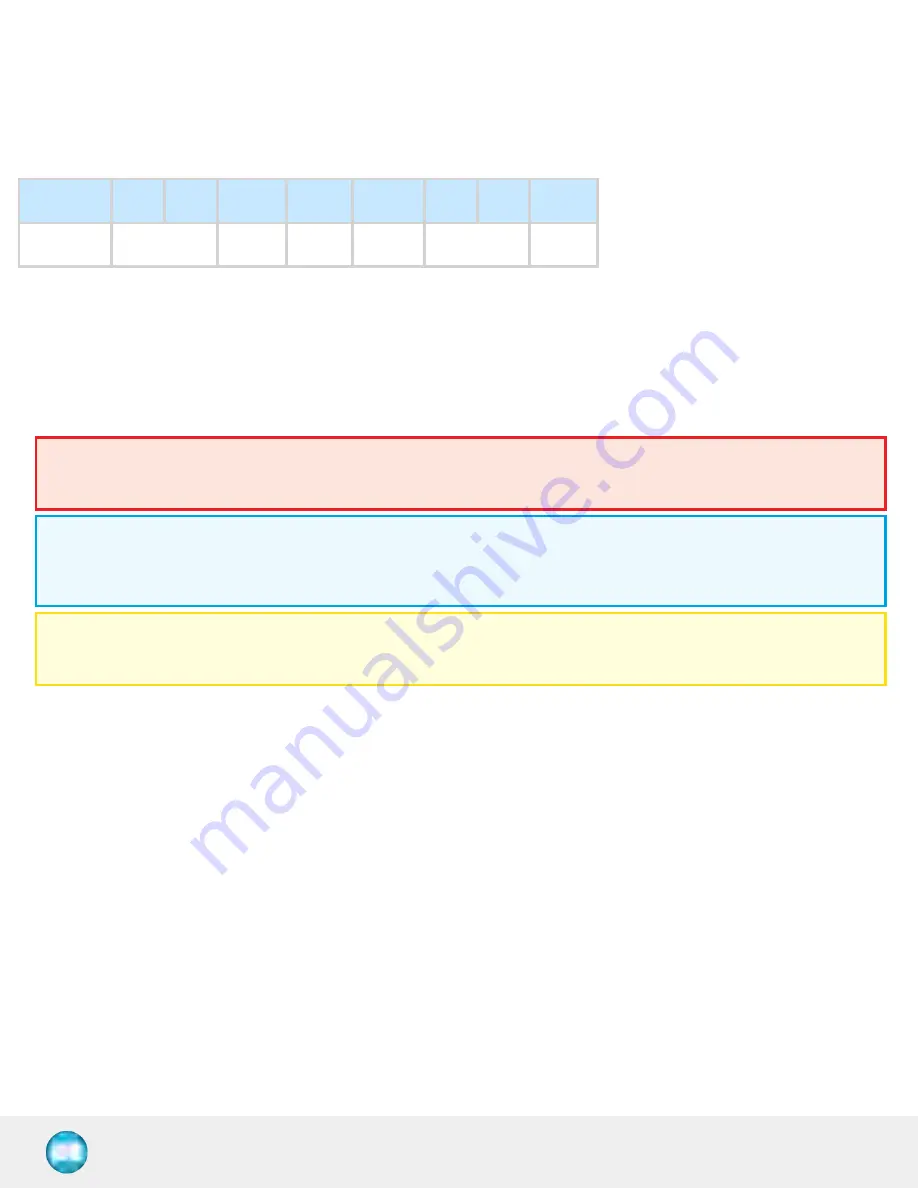
4.3.1. Register: ACTION REQUEST
Address: Byte 0
Bits
7
6
5
4
3
2
1
0
Symbols
Reserved
rARD
rATR
rGTO
Reserved
rACT
rACT
First action to be made prior to any other actions, rACT bit will activate the gripper. Clear the rACT bit to reset the gripper and
clear any fault status.
l
0x0 - Deactivate Gripper.
l
0x1 - Activate Gripper (must stay on after activation routine is completed).
Warning
When setting rACT (rACT ==1), the gripper will begin movement to complete its activation feature.
Info
Power loss will set rACT (rACT ==1); the rACT bit must then be cleared (rACT ==0), then set again to allow operation of
the gripper.
Caution
The rACT bit must stay on afterwards for any other action to be performed.
rGTO
The "Go To" action moves the gripper fingers to the requested position using the configuration defined by the other registers,
rGTO will engage motion while byte 3, 4 and 5 will determine aimed position, force and speed. The only motions performed
without the rGTO bit are activation and automatic release routines.
l
0x0 - Stop.
l
0x1 - Go to requested position.
32


























































