





























Pioneer LX User's Guide, Rev. A
Page 50 of 125
Chapter 5: Programming
In addition to the ARIA library, MobileRobots provides additional development libraries,
including the ArNetworking framework for network programming over TCP and UDP, and the
ARNL intelligent navigation library. Useful tools for robot development also include the
MobileSim simulator, the MobileEyes user interface application, and the Mapper3 map editing
tool. This software can be found on the CD provided with the robot, and at
/robots.mobilerobots.com/wiki/Software
ARIA automatically handles all communication with the robot components and many acces-
sory devices, including but not limited to the laser rangefinder, the robot’s sonar and bumper
sensors, LCD display, pan/tilt cameras and pan/tilt units, and more. To communicate with the
robot, ARIA sends and receives messages with the robot’s embedded firmware. When using
ARIA or other development software, however, you do not need to implement this protocol
directly. (See
on page 113 for a description of this protocol.)
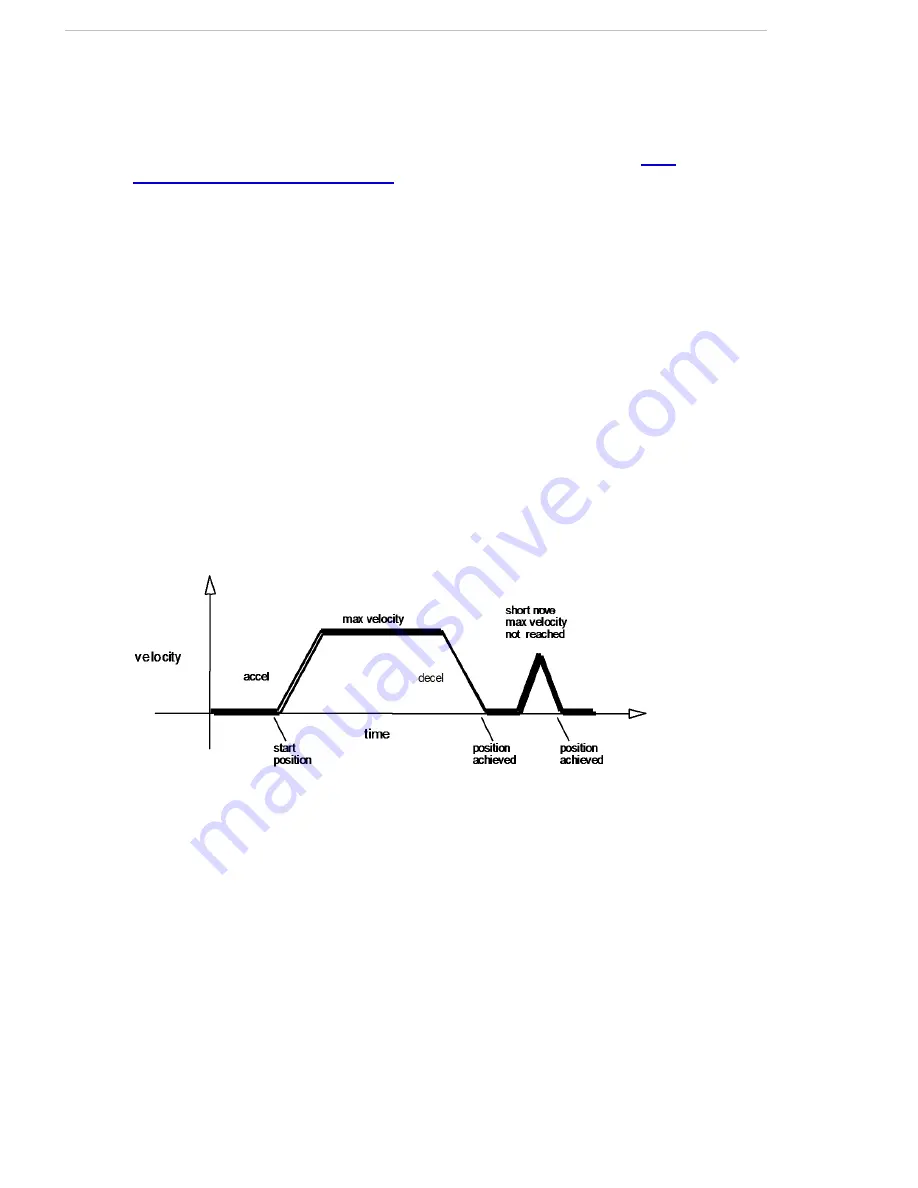
5.2 Robots in Motion
When Pioneer LXreceives a motion command, it accelerates or decelerates the robot according
to acceleration or deceleration parameters previously set until the platform either achieves the
requested speed (for velocity commands) or nears the requested movement distance (when per-
forming MOVE, HEAD and DHEAD commands). Rotation headings and translation set-
points are achieved by a trapezoidal velocity function, which MARCOS recomputes each time
it receives a new motion command.
MARCOS automatically limits velocities, acceleration and deceleration to client-modifiable lim-
its and ultimately by absolute limits. These limits take effect on subsequent commands, not
on the current translation or rotation activity, and are reset when the client disconnects or the
robot system is reset.
The orientation position commands (setHeading(), setDeltaHeading()) turn the robot with
respect to its internal dead-reckoned angle to an absolute heading (0-359 degrees), relative to
its immediate heading, or relative to its current heading setpoint (achieved or last commanded
heading), respectively.
The STOP command is equivalent to requesting both translation and rotation velocities of 0;
the robot will decelerate to 0. The E-STOP command #55 overrides normal deceleration and
abruptly stops the robot in the shortest distance and time possible. Accordingly, the robot
brakes to zero translational and rotational velocities with very high deceleration and remains
stopped until it receives a subsequent translation or rotation velocity command from the client.
Summary of Contents for Pioneer LX
Page 1: ...User s Guide Rev A November 2013...
Page 16: ......
Page 32: ......
Page 36: ......
Page 48: ......
Page 60: ......
Page 82: ......
Page 108: ......
Page 125: ...10 Colrumbia Drive Amherst NH 03450 USA Phone 1 603 881 7960 www mobilerobots com...







































































