





























NeuronBot
List of Figures
61
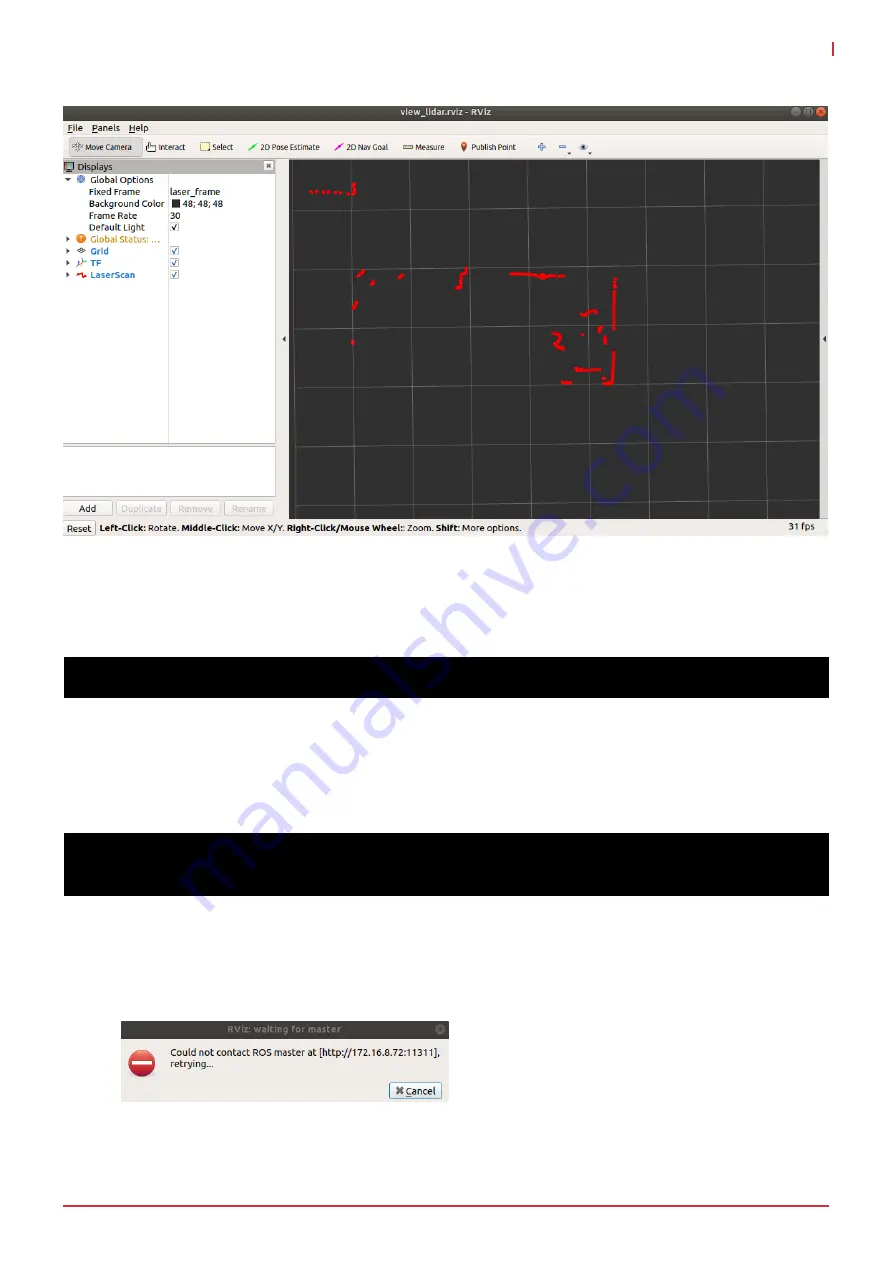
If the LiDAR-generated red lines which do not appear, try the following:
1. Perform LiDAR initialization again. For details, see NeuronBot Setup on page 33.
2. Disconnect and reconnect all USB cables and restart NeuronBot.
3. Execute the following command:
You should find /dev/rplidar linked to /dev/ttyUSB*.
6.1.3. LED Test
Execute the LED diagnostic command as follows:
The LED color will change.
6.2. FAQ
1. Q: What causes “Could not contact ROS master…”?
A: The program cannot locate the ROS Master. Please verify that roscore is running and that ROS_IP and
ROS_MASTER_URI are correctly set. For details, see ROS 1 Remote Control Settings on page 35.
cd ~/neuronbot2_ros1_ws/src/neuronbot2/neuronbot2_tools/neuronbot2_init/
./neuronbot2_test.sh 3
ls /dev/rplidar -l







































































