





























Communication extension card
-35-
CANopen communication.
Command analysis: You need to set the VFD start mode and frequency reference mode to CANopen
communication (P00.01=2, P00.02=1, P00.06=9) first. In this example, use Setting 2 to set the running
frequency (P15.03=1, that is, set Received PZD3 to "
1: Set frequency
").
When a
CW is 0×01, it indicates that the VFD is to be run. To set the frequency to 50 Hz, you need to set
Setting 2 to 5000, that is, 0x1388.
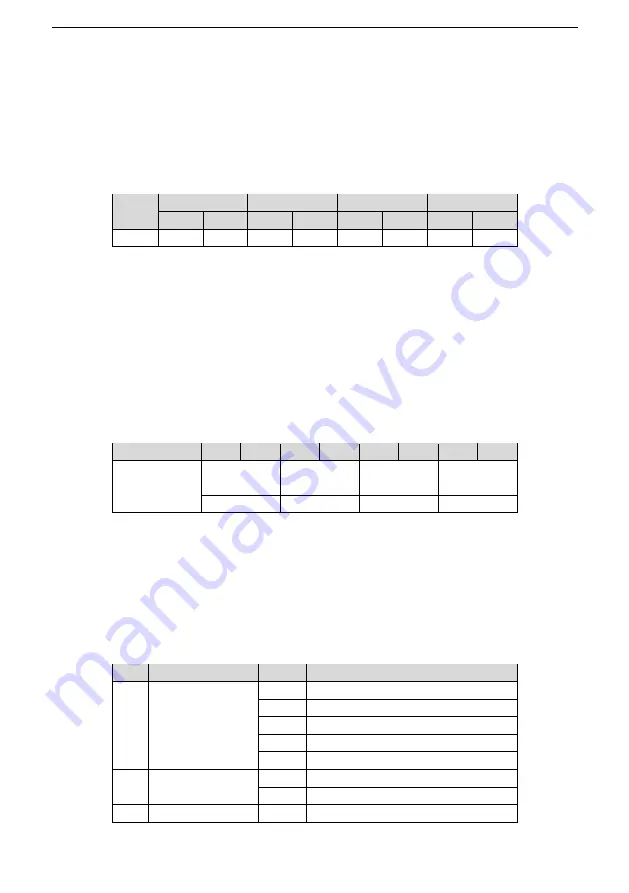
The PDO2 Rx command transmitted by the master station is as follows.
COB-
ID
CW
Setting 1
Setting 2
Setting 3
Byte0
Byte1
Byte2
Byte3
Byte4
Byte5
Byte6
Byte7
0x303
0x01
0x00
0x00
0x00
0x88
0x13
0x00
0x00
3.5.4
PDO2 Tx
PDO2 Tx is a command transmitted by a VFD to the master station. It contains a SW and real-time process
data (Returned value 1, returned value 2, and returned value 3). A SW is used to notify of the state of the
VFD, and returned values are used to transmit the real-time running values of VFD, such as running
frequency.
The default transmission type of PDO2 Tx is 254, and therefore PDO2 Tx is transmitted once data
corresponding to a SW or returned value changes.
⚫
Command
Slave station -> master station
COB-ID
Byte0 Byte1 Byte2 Byte3 Byte4 Byte5 Byte6 Byte7
0x280+NODEID
SW
Returned value
1
Returned value
2
Returned value
3
0x2001.00
0x2000.03
0x2000.04
0x2000.05
⚫
Description
A SW is two bytes. Byte0 is the LSB, and Byte1 is the MSB.
describes the definitions of the Astraada DRV-28 series VFD SWs. For VFD of other series, see the
corresponding VFD operation manual.
Table 3-18 Astraada DRV-28 series VFD SWs
Bit
Name
Value
Description
0
–
7
Running state
1
In forward running
2
In reverse running
3
Stopped
4
Faulty
5
POFF
8
Bus voltage
established
1
Ready to run
0
Not ready to run
9
–
10
Motor group
0
Motor 1







































































