





























AS64 series AC servo drive Function codes
-135-
This parameter specifies the function for capturing the encoder position through the jump edge of
the DI port in real time. You can check the obtained result through R1.16.
Data bit
Description
Remarks
bit0–3
Bits 0–3 = 0x1–0Xa, corresponding to
capturing DI1–DI10
Others are
invalid.
bit8–9
Bit 8 = 1 and bit 9 = 0: Capture only through
the falling edge of the DI port.
Bit 8 = 0 and bit 9 = 0: Capture only through
the rising edge of the DI port.
Bit 8 = 1 and bit 9 = 1: Capture through
both the rising edge and falling edge of the
DI port.
P3.16
Data size
16bit
Data format
DEC
Modbus address
1632, 1633
CANopen address
0x2310, 0x00
6.4.2 Analog input/output
P3.20
Offset of AI 1
Setting range
Default
Unit
Applicable
mode
-10.000–10.000
0.000
V
P
S
T
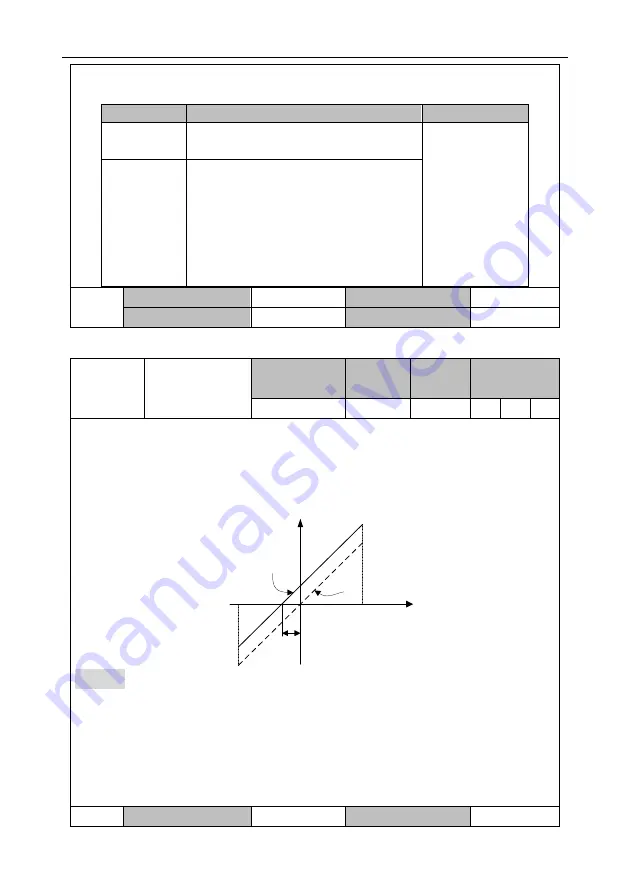
This parameter is used to adjust analog input 1 to improve the effective accuracy of the AI.
Due to reasons such as the zero drift of analog input devices or induced voltage in the ambient
environment, the actual analog input value may deviate from the expected value, and such
deviation can be eliminated by setting the offset of AI.
See the following figure for the analog input offset voltage:
-10V
10V
Actual voltage (V)
Sampling voltage (V)
After setting
P3.20
P3.23
Before setting
Example:
After the command terminal of drive analog input 1 is connected to the analog
reference signal, even if the analog reference signal is 0, the voltage of analog input 1,
(specified by R1.05), is displayed as 0.02V on the panel, P3.20 must be set to 0.02 at this time.
The drive automatically subtracts 0.02V from the analog input value received. If the voltage of
analog input 2, displayed by the panel, is -0.02V, P3.20 must be set to -0.02. The drive
automatically adds 0.02V to the analog input value received, and the value displayed on the
panel changes as well.
P3.20
Data size
32bit
Data format
DEC







































































