























Access from the user program
KL2542
33
Version: 2.0.0
5.4
Register description
All registers can be read or written via
register communication [
}
38]
. They are used for the
parameterization of the terminal.
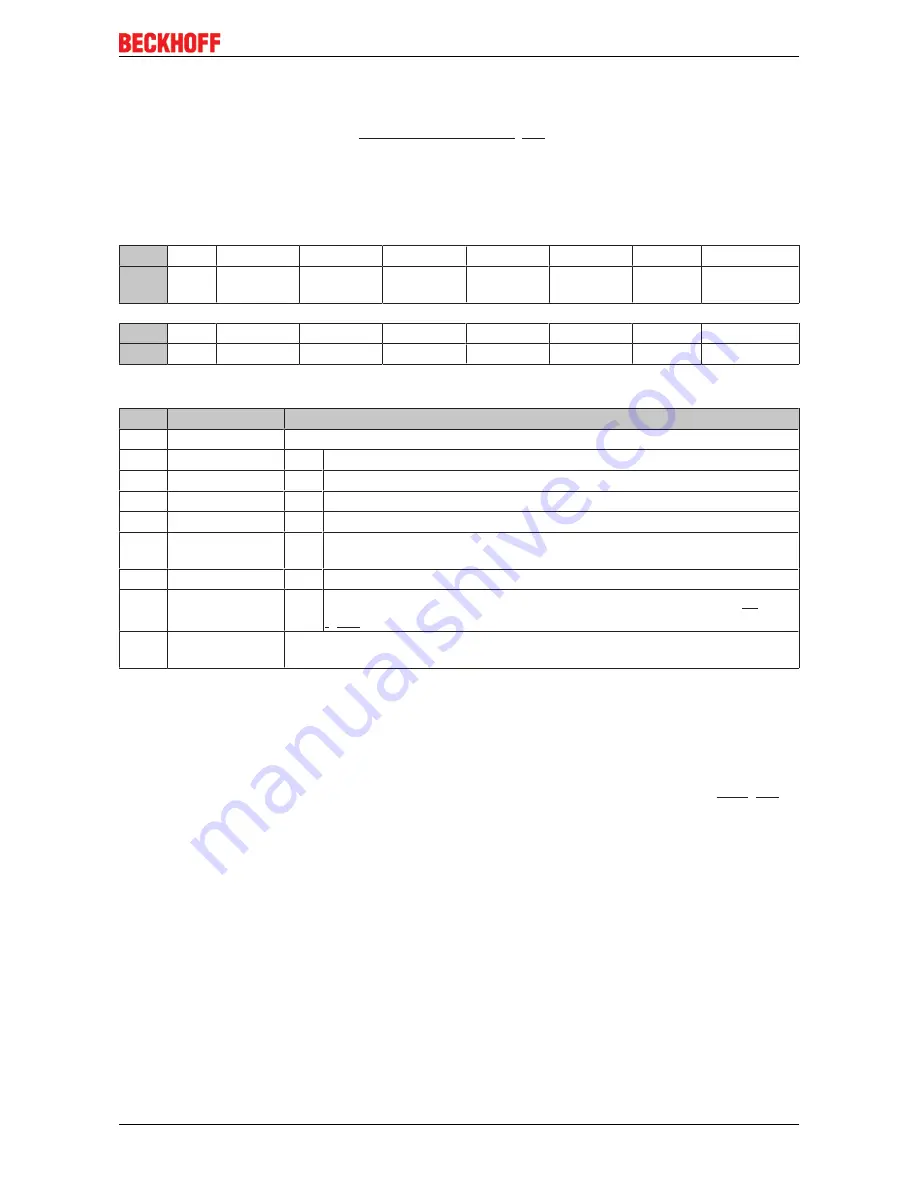
R0: Status word
The status word contains information about internal states, and provides an indication of errors that have
occurred.
Bit
R0.15 R0.14
R0.13
R0.12
R0.11
R0.10
R0.9
R0.8
Name
-
NoControl
Power
Torque
Overload
Over
Current
Under
Voltage
Over
Voltage
Low
Voltage
Over
Temperature
Bit
R0.7
R0.6
R0.5
R0.4
R0.3
R0.2
R0.1
R0.0
Name
-
-
-
-
-
-
-
-
Key
Bit
Name
Description
R0.15 -
reserved
R0.14 NoControl Power 1
bin
The 24 V control voltage is not present at the power contacts
R0.13 Torque Overload 1
bin
Torque is greater than specified in R38
R0.12 Over Current
1
bin
Overcurrent in the driver stage
R0.11 Under Voltage
1
bin
Supply voltage less than 7 V
R0.10 Over Voltage
1
bin
Supply voltage greater than 15% of the switch-on voltage (with R39=0) or
greater than specified in R39 (with R39<>0)
R0.9
Low Voltage
1
bin
The supply voltage is 10 V less than the switch-on voltage
R0.8
Over
Temperature
1
bin
The internal temperature of the terminal is greater than 80 °C (see
R5
[
}
34]
)
R0.0 -
R0.7
-
reserved
R1: Set position
You can specify the desired position, with which the terminal is to be loaded, here.
R2: Torque
This register always contains the last and maximum value of the previous milliseconds (register
R46 [
}
37]
)
for the current torque. This value is unitless, normalized relative to 1000, and always positive. It is calculated
as follows:
1.0
M = | E x 1000 / V
C
|
where
1.1
E = V
C
- V
G
1.2
V
C
= V
S
x DataOUT / 32767
with
M
Torque (magnitude)
[M] = 1
E
Control error
[E] = 1 V
V
S
Supply voltage
[V
S
] = 1 V
V
G
Countervoltage of the motor
[V
G
] = 1 V
V
C
Set velocity (set voltage, relative to the process data)
[V
C
] = 1 V
Summary of Contents for KL2542
Page 2: ......







































































