





























Curtiss-Wright | PG Drives Technology
SK77981-14
69 | R-net Technical Manual | Chapter 3 – Programming
4.1
PROFILE NAME
This is a 20 character text string that will appear on the JSM LCD screen to indicate the Profile that is selected. More info rmation
is given in the above text.
4.2
PROFILE ENABLE - (PRFEN)
This sets whether a particular Profile is available for selection by the wheelchair user. More information is given in the ab ove
text.
NOTE:
A Control System utilizing an LED JSM should only be programmed with a maximum of 5 Profiles enabled.
4.3
MODE ENABLE (MODES)
This sets which operating Modes are available in each of the Profiles. More information is given in the above text.
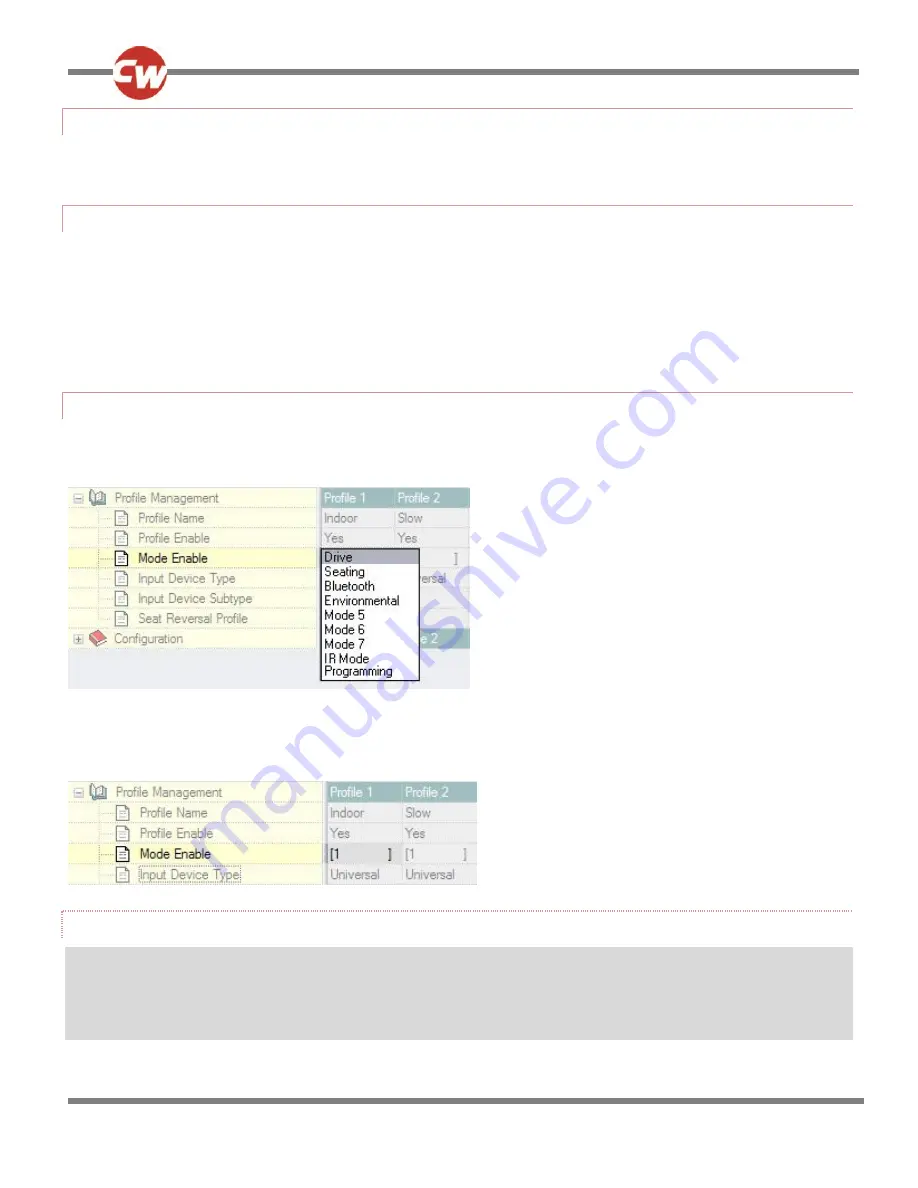
If this parameter is selected, a drop down menu as below will appear.
To set whether a Mode is enabled, simply highlight the appropriate menu item. Any combination of Modes can be selected.
When the drop down menu is closed the selected Modes are expressed as numbers and the p arameter appears on the screen
as below. The numbers 1 to 8 refer to the Modes listed in the menu.
INPUT DEVICES EXPLA INED
It is possible to connect two Input Devices of different types, for example, a conventional JSM and a Head Control into the same
system. Alternatively, it is sometimes (but rarely) required, to connect two Input Devices of the same type.
The parameters Input Device Type, Input Device Subtype and Allow Grab, allow you to manage th e priorities of control of the
two connected Input Devices.






































































