136
SPAN-SE User Manual Rev 1
Appendix B
Commands
B.4.29 SETIMUTOANTOFFSET
Set IMU to antenna offset
It is recommended that you mount the IMU as close as possible to the GNSS antenna, particularly in
the horizontal plane. This command is used to enter the offset between the IMU and the GNSS
antenna. The measurement should be done as accurately as possible, preferably to within millimeters
especially for RTK operation. The x, y and z fields represent the vector from the IMU to the antenna
phase center in the IMU enclosure frame. The a, b and c fields allow you to enter any possible errors
in your measurements. If you think that your ‘x’ offset measurement is out by a centimeter for
example, enter 0.01 in the ‘a’ field.
The X (pitch), Y (roll) and Z (azimuth) directions of the inertial frame are clearly marked on the IMU.
This command must be entered before or during the INS alignment mode (not after).
Abbreviated ASCII Syntax:
Message ID: 383
SETIMUTOANTOFFSET
x y z [a] [b] [c]
Abbreviated ASCII Example:
SETIMUTOANTOFFSET 0.54 0.32 1.20 0.03 0.03 0.05
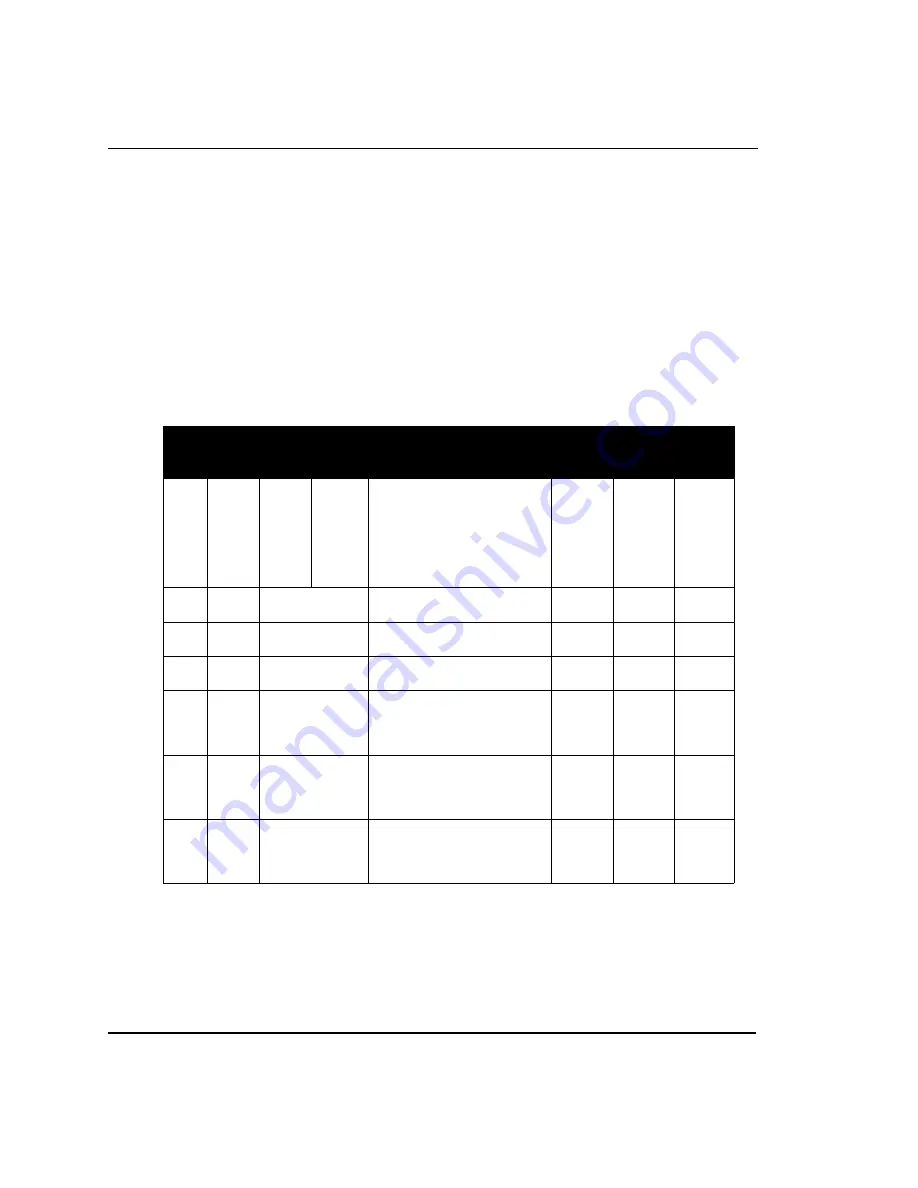
Field
Field
Type
ASCII
Value
Binary
Value
Description
Binary
Format
Binary
Bytes
Binary
Offset
1
header -
-
This field contains the
command name or the message
header depending on whether
the command is abbreviated
ASCII, ASCII or binary,
respectively.
-
H
0
2
x
± 20
x offset (m)
Double
8
H
3
y
± 20
y offset (m)
Double
8
H+8
4
z
± 20
z offset (m)
Double
8
H+16
5
a
0 to +1
Uncertainty in x (m)
(Defaults to 10% of the x offset
to a minimum of 0.01 m)
Double
8
H+24
6
b
0 to +1
Uncertainty in y (m)
(Defaults to 10% of the y offset
to a minimum of 0.01 m)
Double
8
H+32
7
c
0 to +1
Uncertainty in z (m)
(Defaults to 10% of the z offset
to a minimum of 0.01 m)
Double
8
H+40