2/22/2018
ROBOTIS e-Manual
http://emanual.robotis.com/docs/en/dxl/x/xm430-w210/
10/34
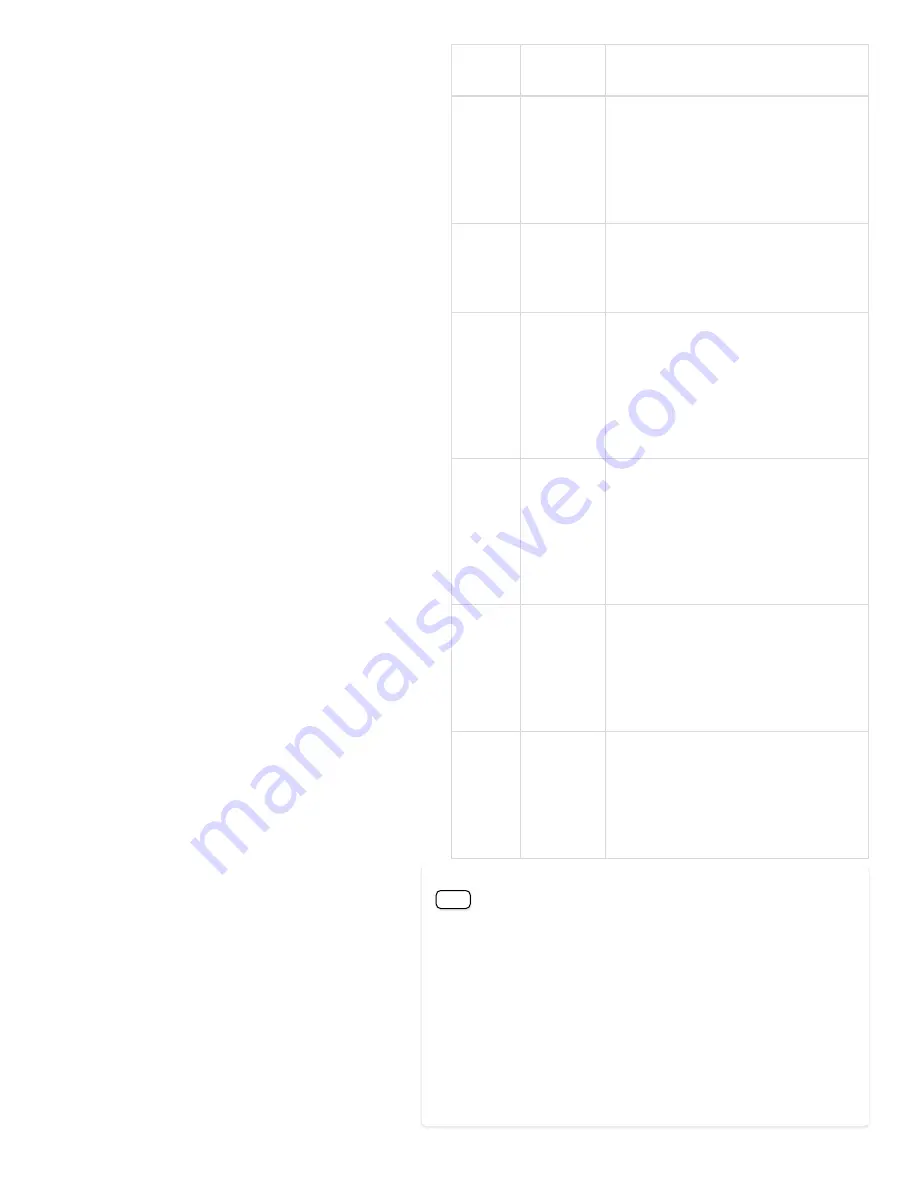
Value
Operating
Mode
Description
0
Current
Control
Mode
DYNAMIXEL only controls current(torque)
regardless of speed and position. This mode
is ideal for a gripper or a system that only
uses current(torque) control or a system
that has additional velocity/position
controllers.
1
Velocity
Control
Mode
This mode controls velocity. This mode is
identical to the Wheel Mode(endless) from
existing DYNAMIXELs. This mode is ideal for
wheel-type robots.
3(Default)
Position
Control
Mode
This mode controls position. This mode is
identical to the Joint Mode from existing
DYNAMIXELs. Operating position range is
limited by Max Position Limit(48) and Min
Position Limit(52). This mode is ideal for
articulated robots that each joint rotates
less than 360 degrees.
4
Extended
Position
Control
Mode(Multi-
turn)
This mode controls position. This mode is
identical to the Multi-Turn Mode from
existing DYNAMIXELs. 512 turns are
supported(-256[rev] ~ 256[rev]). This mode
is ideal for multi-turn wrists or conveyer
systems or a system that requires an
additional reduction gear.
5
Current-
based
Position
Control
Mode
This mode controls both position and
current(torque). Up to 512 turns are
supported(-256[rev] ~ 256[rev]). This mode
is ideal for a system that requires both
position and current control such as
articulated robots or grippers.
16
PWM
Control
Mode
(Voltage
Control
Mode)
This mode directly controls PWM output.
(Voltage Control Mode)
Note
Switching Operating Mode will reset gains(PID,
Feedfoward) properly to the selected Operating Mode. The
profile generator and limits will also be reset.
1. Profile Velocity(112), Profile Acceleration(108) : Reset to ‘0’
2. Goal PWM(100), Goal Current(102) : Reset to PWM Limit(36),
Current Limit(38) respectively
3. Current-based Position Control Mode : Reset to Position
Gain(PID) and PWM Limit(36) values.
Changed Position Gain(PID) and PWM Limit(36) values can be
read from the Control Table.
Back to Top ▲