2/22/2018
ROBOTIS e-Manual
http://emanual.robotis.com/docs/en/dxl/x/xm430-w210/
25/34
distance difference between target position and current
position).
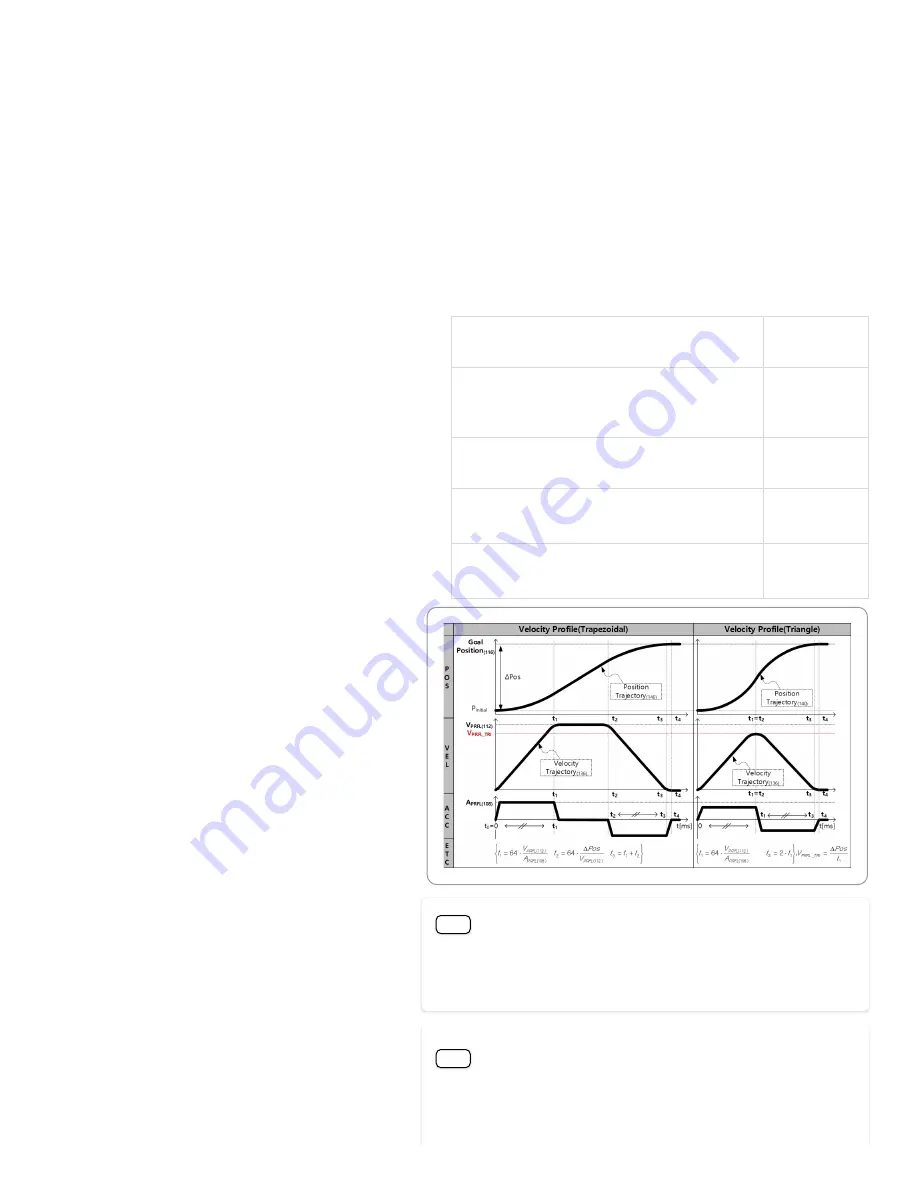
4. Selected Profile type is stored at Moving Status(123).(Refer
to the Moving Status(123))
5. Dynamixel is driven by the calculated target trajectory from
Profile.
6. Target velocity trajectory and target position trajectory
from Profile are stored at Velocity Trajectory(136) and
Position Trajectory(140) respectively.
7. V
PRFL_TRI
of
③
and Travel time(t3) to reach Goal
Position(116) is calculated as below.
Condition
Types of
Profile
V
PRFL
(112) = 0
Profile not used
(Step
Instruction)
(V
PRFL
(112) ≠ 0) & (A
PRF
(108) = 0)
Rectangular
Profile
(V
PRFL
(112) ≠ 0) & (A
PRF
(108) ≠ 0) & (V
PRFL_TRI
≤
V
PRFL
(112))
Triangular
Profile
(V
PRFL
(112) ≠ 0) & (A
PRF
(108) ≠ 0) & (V
PRFL_TRI
>
V
PRFL
(112))
Trapezoidal
Profile
Note
Dynamixel supports Jerk control in order to minimize
dramatic change of acceleration. Therefore, actual travel time by
the target trajectory of Profile could be longer than t3(t4 of above
figure).
Note
Velocity Control Mode only uses Profile Acceleration(108).
Step and Trapezoidal Profiles are supported. Velocity Override
and Jerk control are supported as well. Acceleration time(t1) can
Back to Top ▲