





























56
Modbus TCP:
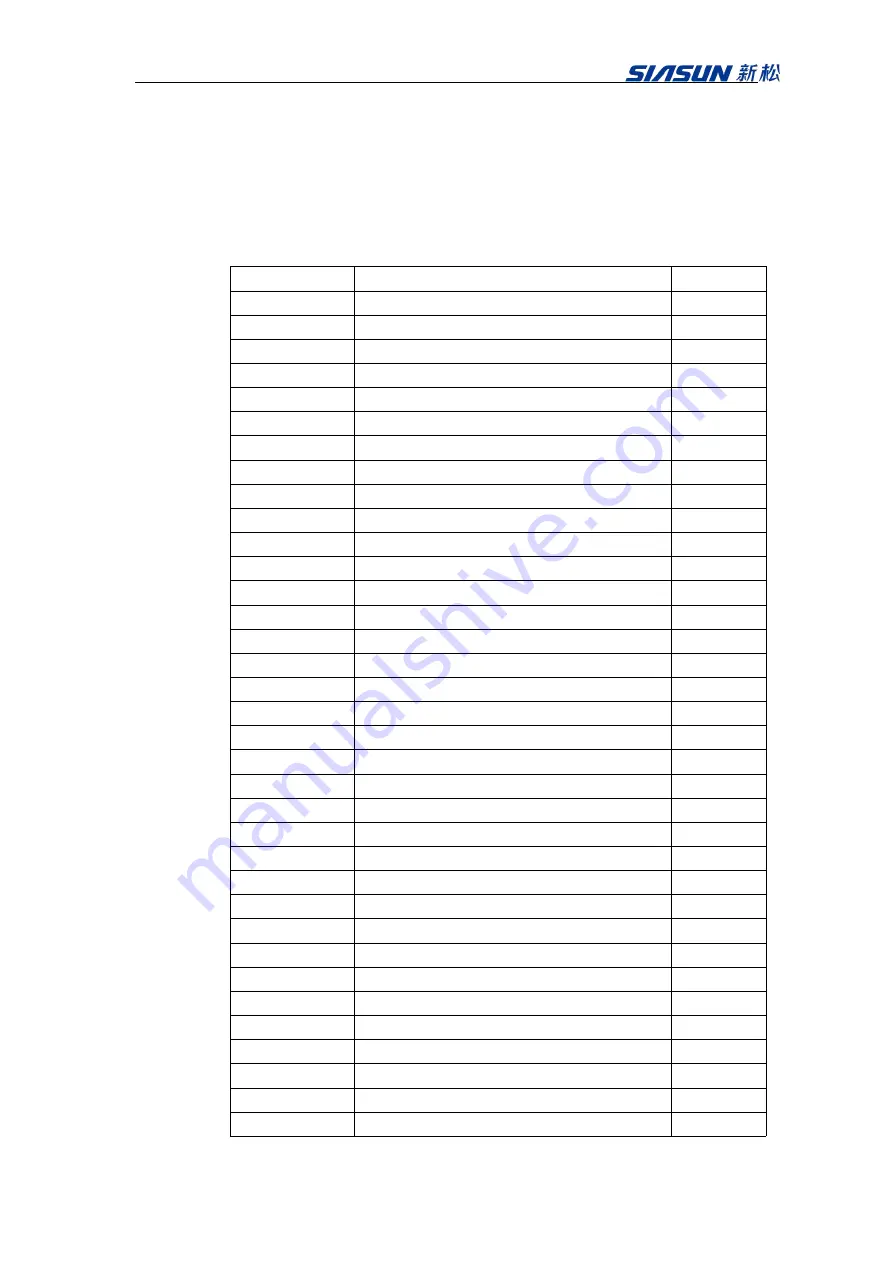
Robot is a Modbus Server waiting for connection from external Modbus clients.
Robot Modbus setting
:
Colis: Read (number: 1) and Write (number: 5)
Address
Node Introduction
R/W right
1
locked
R
2
running program
R
3
standby
R
4
paused
R
5
program stopped (rising edge)
R
6
error
R
7
Control box IO output
,
io_out[1]
R/W
8
Control box IO output
,
io_out[2]
R/W
9
Control box IO output
,
io_out[3]
R/W
10
Control box IO output
,
io_out[4]
R/W
11
Control box IO output
,
io_out[5]
R/W
12
Control box IO output
,
io_out[6]
R/W
13
Control box IO output
,
io_out[7]
R/W
14
Control box IO output
,
io_out[8]
R/W
15-32
reserved
/
33
Flange IO output
,
tool_out[1]
R/W
34
Flange IO output
,
tool_out[2]
R/W
35-50
reserved
/
51
robot locked
R
52
run program
R
53
pause program
R
54
stop program
R
55-56
reserved
/
57
Control box IO input
,
IO_in[1]
R
58
Control box IO input
,
IO_in[2]
R
59
Control box IO input
,
IO_in[3]
R
60
Control box IO input
,
IO_in[4]
R
61
Control box IO input
,
IO_in[5]
R
62
Control box IO input
,
IO_in[6]
R
63
Control box IO input
,
IO_in[7]
R
64
Control box IO input
,
IO_in[8]
R
65-72
reserved
/
73
Flange IO input, tool_in[1]
R
74
Flange IO input, tool_in[2]
R
75-80
reserved
/































































