








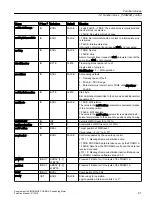




















Name
P type
1)
Data type
Default
Meaning
reqControl
IN
BOOL
FALSE
Control requested by the open-loop control
p701 = 1: Message frame substitution active
= TRUE: PROFIBUS data are taken over by the POSMO A
= FALSE: Data from the PROFIBUS are frozen; the most recent data
received are used
p701 = 0: Message frame substitution inactive. Behavior as with
POSMO A before software version V3.0
busy
IN/OUT BOOL
-
Coordination of the function blocks
pkwOut
IN/OUT AR‐
RAY[0..7] of
BYTE
-
Prepared FB data for I/O outputs of the POSMO A (parameter iden‐
tifier value interface)
pzdOut
IN/OUT AR‐
RAY[0..3] of
BYTE
-
Prepared FB data for I/O outputs of the POSMO A (process data
interface)
ready
OUT
BOOL
FALSE
Drive ready for operation,
AND operation: Status word bit 2, bit 1, bit 0
active
OUT
BOOL
FALSE
= TRUE: Drive traveling (n > 0)
dataReady
OUT
BOOL
FALSE
Several cycles are required for transferring the ramp-up time, for ex‐
ample. Completion of the data transfer is indicated by a rising edge.
= TRUE: Data transfer finished, data have been transferred
= FALSE: Data transfer in progress (e.g. ramp-up time)
statusWord
OUT
WORD
16#0000 Display of status word
actValue
OUT
DINT
0
Actual speed
error
OUT
BOOL
FALSE
= TRUE: Request completed with error
(refer to the errorID parameter)
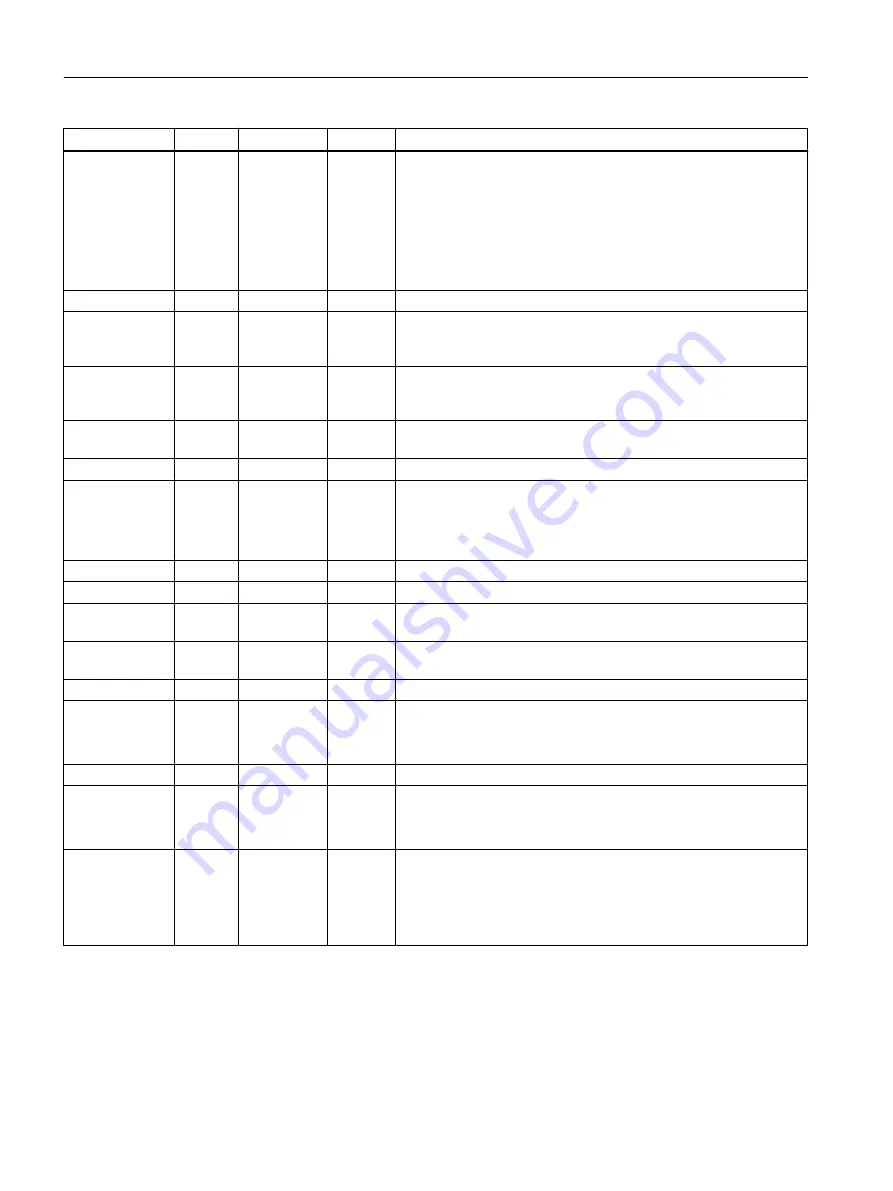
errorID
OUT
WORD
16#0000 Number of the parameter assignment error signaled by the drive
(parameter identifier value (PKW) range)
2)
driveError
OUT
BOOL
FALSE
Drive error is pending
driveErrorId
OUT
WORD
16#0000 Reason for the error
Bit format
Value corresponds to parameter 947 (errors)
2)
driveWarning
OUT
BOOL
FALSE
A drive warning is pending (refer to parameter driveWarnId).
driveWarnId
OUT
WORD
16#0000 Reason for the warning
Bit format
Value corresponds to parameter 953 (warnings)
2)
driveWarnInfo
OUT
WORD
16#0000 Supplementary information for warnings (for POSMO A, firmware
version 1.4 and higher)
Bit format
The value corresponds to P954, (supplementary information for
warnings)
1)
Parameter types: IN = input parameter, OUT = output parameter, IN/OUT = in/out parameter
2)
See
Distributed Positioning Motor on PROFIBUS DP
user manual
Function blocks
3.3 Function block _POSMOA_nControl
Supplement to SIMODRIVE POSMO A Positioning Motor
26
Function Manual, 01/2015







































































