




























Parameter description
Note
The SIMOTION identifiers have changed as of V4.0.
You can find a comparison of SIMOTION and SIMATIC names in the Appendix SIMOTION
and SIMATIC names (Page 51).
The busy parameter must not be overwritten by the user. It is supplied and checked by the
function block, and must be supplied with a global variable created by the user only when the
respective function block is called. This parameter coordinates the individual function blocks
for the POSMO A. This ensures that no more than one function block can access a POSMO A
at the same time.
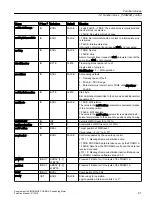
Table 3-4
Parameters of the _POSMOA_rwAllParameter function block
Name
P type
1)
Data type
Default
Meaning
pkwIn
IN
ARRAY [0..7] of
BYTE
8(16#00) Transfer I/O inputs of POSMO A to FB
execRead
IN
BOOL
FALSE
= edge FALSE → TRUE: Reads all data one time
The start takes place on a positive edge.
execWrite
IN
BOOL
FALSE
= edge FALSE → TRUE: Writes all data one time
The start takes place on a positive edge.
posMode
3)
IN
BOOL
TRUE
= TRUE: Positioning mode of the POSMO A
= FALSE: Speed-controlled mode
pkwOut
IN/OUT ARRAY [0..7] of
BYTE
-
Prepared FB data for I/O outputs of the POSMO A
allParaPosmoA
IN/OUT Struct_POS‐
MOA_params
-
Data structure for all parameters of the POSMO A
busy
IN/OUT BOOL
-
Coordination of the FBs
done
OUT
BOOL
FALSE
= TRUE: When current request has been completed
= FALSE: There is no request pending, or a request is being
executed.
error
OUT
BOOL
FALSE
= TRUE: Request completed with error (refer to the errorID
parameter)
errorID
OUT
WORD
16#0000
Number of the parameter assignment error signaled by the
drive (parameter identifier value (PKW) range)
2)
errorParaNumber
OUT
INT
0
Number of the parameter that caused the error
2)
1)
Parameter types: IN = input parameter, OUT = output parameter, IN/OUT = in/out parameter
2)
See
Distributed Positioning Motor on PROFIBUS DP
user manual
3)
As of SIMOTION V4.1, this parameter is part of the _POSMOA_rwAllParameter FB and can only be operated with POSMO A
software version 3.0 and higher.
Data structure of Struct_POSMOA_params
The data structure of type Struct_POSMOA_params contains all of the parameters for
controlling the SIMODRIVE POSMO A.
Function blocks
3.5 Function block _POSMOA_rwAllParameter
Supplement to SIMODRIVE POSMO A Positioning Motor
34
Function Manual, 01/2015







































































