





























5.3 Tapping Operation
5-19
Spindle Axis
Operation
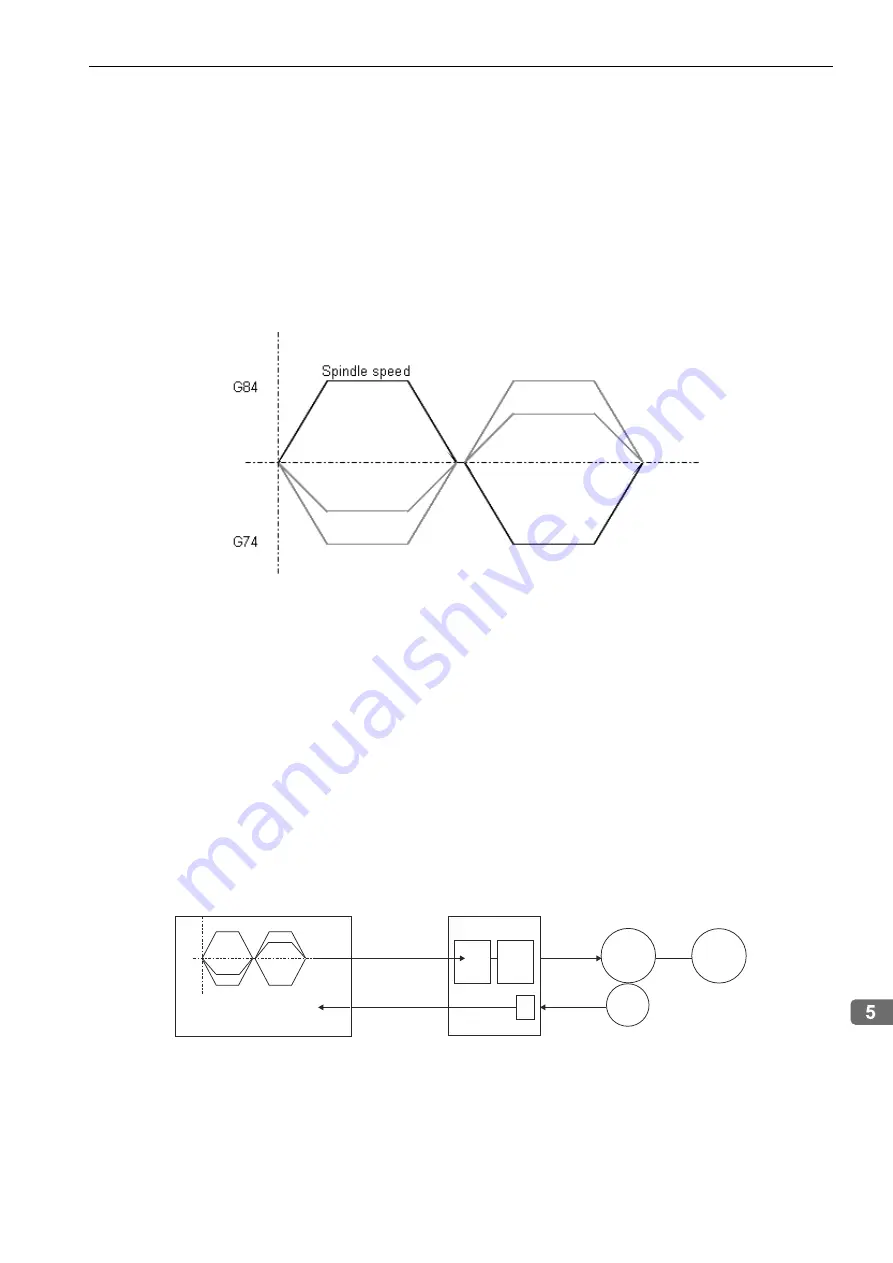
(2) Tapping Interpolation Control
For tapping, linear acceleration/deceleration interpolation with a constant acceleration rate is performed for
the spindle and feed axes.
(The spindle axis revolutions, pitch, tap length, and acceleration rate are specified as parameters.)
The tap acceleration rate is set as a host controller parameter, and tapping acceleration/deceleration interpola-
tion is performed using the feed axis acceleration rate or the spindle axis orientation acceleration rate, which-
ever is the lowest.
Interpolation calculations are synchronized with the MECHATROLINK-III communications cycle.
Use the travel distances that are calculated for linear acceleration/deceleration interpolation between the spin-
dle axis and servo to determine the target positions TPOSs and TPOSz (target value pulses) every communica-
tions cycle for the tapping position references.
Linear Acceleration/Deceleration Interpolation for Tapping
Linear acceleration/deceleration interpolation for tapping is sent each communications cycle for the following
settings.
MECHATROLINK-III INTERPOLATE command
COMMAND INTERPOLATE = 34 hex
SVCMD_CTRL
SVCMD_IO.G-SEL = 2 (gain selection)
SV_MOD=1 (SV_MOD)
Set the TPOSz and TPOSs target positions as the numbers of pulses (interpolation calculation results).
VFF
Δ
Z*% pulses/s if speed feedforward is applied.
The target values TPOSs and TPOSz, SVCMD_IO.G_SEL = 2, and SVCMD_IO.SV_MOD = 1 are loaded for
each servo driver during each communications cycle, and CPOS (reference value) is sent as a servo driver ref-
erence.
The servo driver takes the difference between the reference value CPOS and the feedback value APOS,
applies the position loop gain as the position speed deviation, and performs position loop control.
To confirm if a tap has reached the base of the hole, check if positioning has been completed (DEN + PSET)
after function generator pulse distribution has been completed (DEN), calculate the return tap, and finally per-
form a similar sequence for the return.
DEN and PSET can be checked in SVCMD_IO.DEN and SVCMD_IO.PSET.
Z AXIS speed
SP
SPM
PG
Phase A, B, or C
Position loop
Position
loop
Position
loop
Interpolation
command
with TPOS
MECHATROLINK-
III
Tapping
Tapping interpolation
Feedback position
(APOS)
error
kp
kv







































































