



















Camera
stabilizing
After enabling, the robot will
automatically adjust the attitude of the
camera to keep it in the horizontal
position when turned on.
Gait switching
Specific function for quadruped spider
robots. After enabling, it is switched to
diagonal gait (the default is triangle gait).
Self-stabilizing
mode
Specific function for spider robots. After
enabling, the robot will keep horizontal by
adjusting the legs.
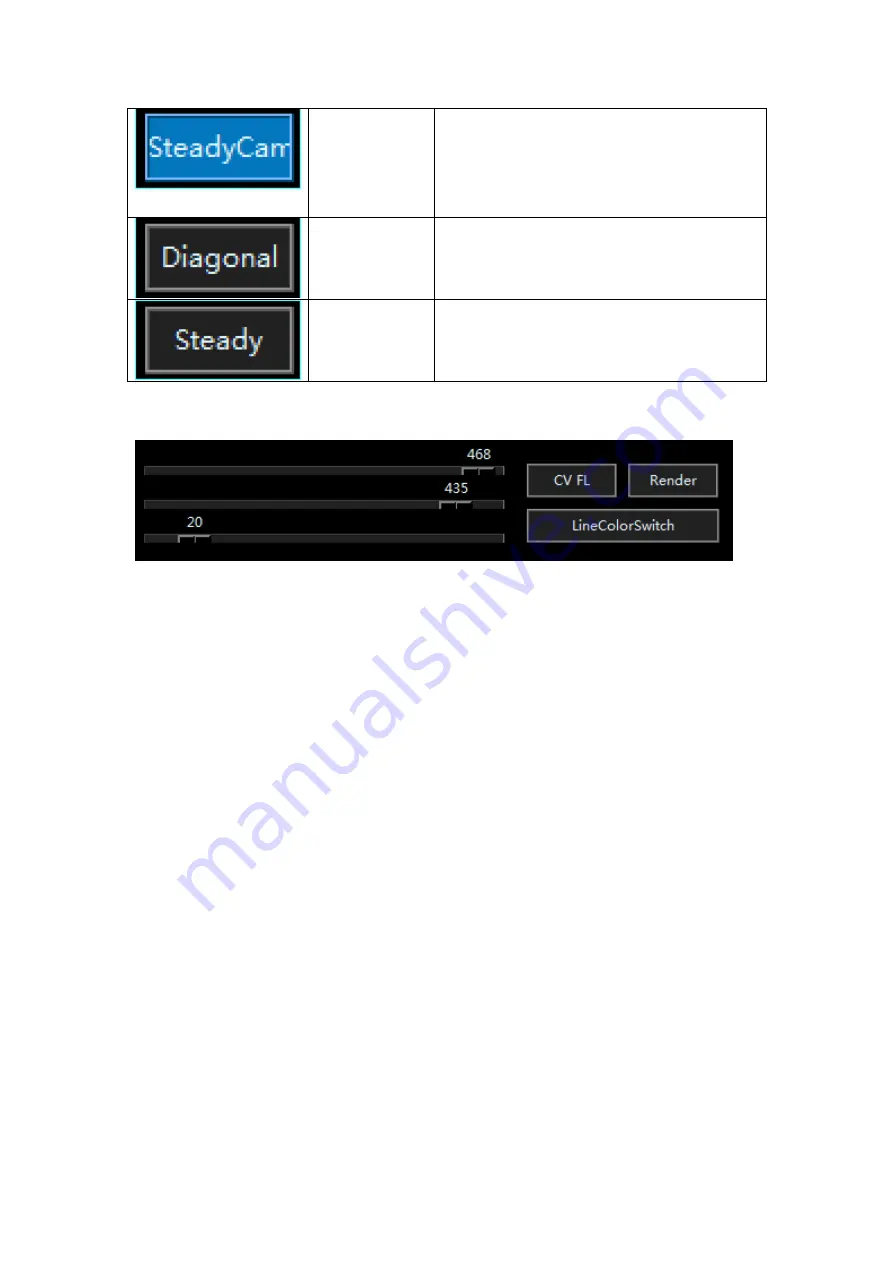
Video line tracking module
This section controls the visual line tracking function.
CV FL
:
enable visual line tracking function.
Render
:
Switch video rendering.
LineColorSwitch
:
Set the color of the line to be tracked (based on the color on the
color setting module).
Three sliders:
The upper and lower sliders respectively control the position of the two auxiliary
lines as shown in the figure below (the values indicate the vertical pixel points
where the auxiliary lines are located). Only the content between the two auxiliary
lines will be used by the robot to determine whether it is the line to be tracked.
Therefore, try to ensure that there is nothing between the two auxiliary lines except
the line to be tracked and the floor.
The last slider is used to control steering sensitivity. The smaller the value, the more
the robot tends to turn left and right when following the line.







































































