



























AgileX Robotics (Dongguan) Co.,Ltd.
24
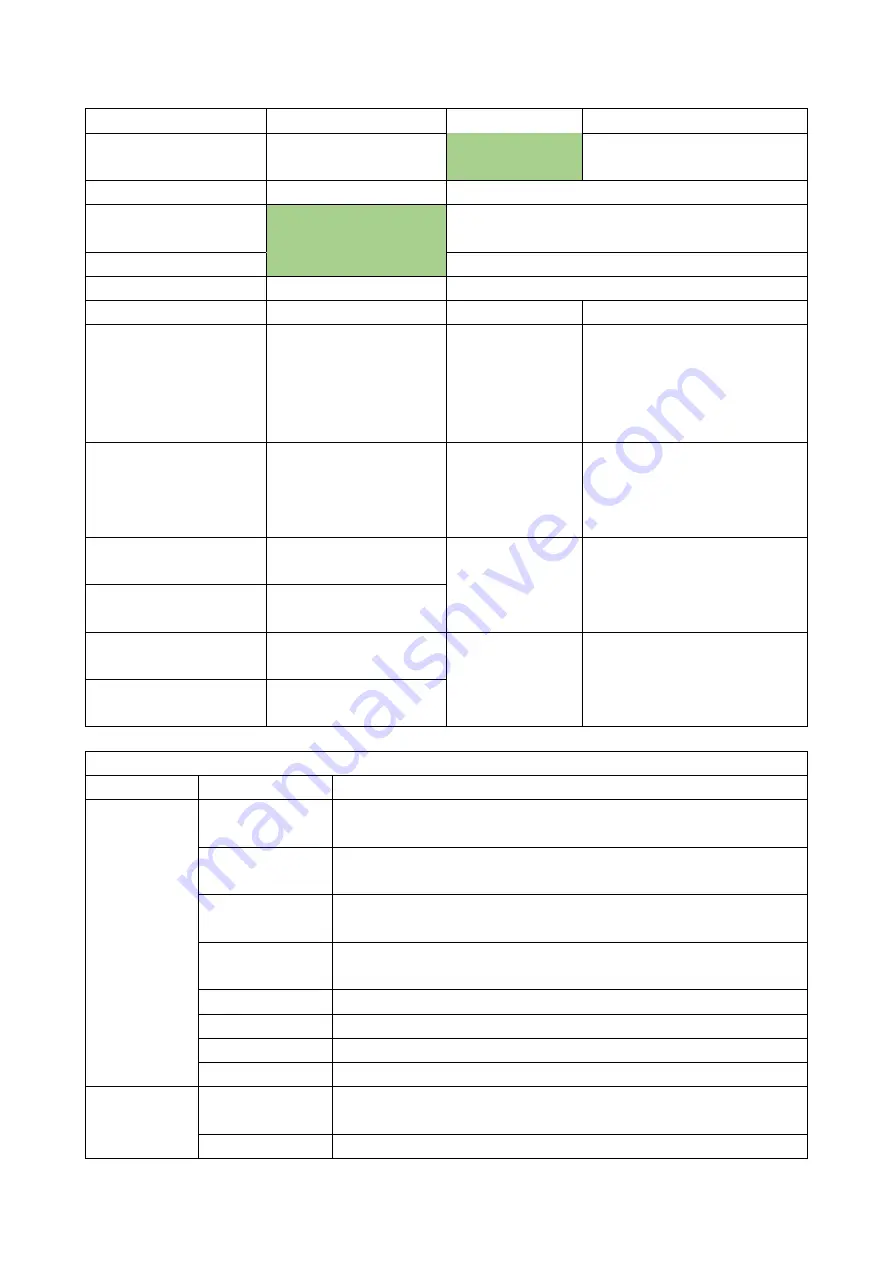
Sending node
Receiving node
Cycle (ms)
Receive-timeout (ms)
Steer-by-wire chassis
Decision-making control
unit
20ms
None
Frame length
0x0a
Command type
Feedback command
(0xAA)
Command ID
0x01
Data field length
6
Position
Function
Data type
Description
byte [0]
Current status of vehicle
body
unsigned int8
0x00 System in normal
condition
0x01 Emergency stop mode (not
enabled)
0x01 System exception
byte [1]
Mode control
unsigned int8
0x00 Remote control mode
0x01 CAN command control
mode
[1]
0x02 Serial port control mode
byte [2]
Battery voltage higher 8
bits
unsigned int16
Actual voltage X 10 (with an
accuracy of 0.1V)
byte [3]
Battery voltage lower 8
bits
byte [4]
Failure information
higher 8 bits
unsigned int16
See notes for details
【**【
byte [5]
Failure information lower
8 bits
Description of Failure Information
Byte
Bit
Meaning
byte [4]
bit [0]
Check error of CAN communication control command (0: No failure 1:
Failure)
bit [1]
Motor drive over-temperature alarm
[1]
(0: No alarm 1: Alarm)
Temperature limited to 55℃
bit [2]
Motor over-current alarm
[1]
(0: No alarm 1: Alarm) Current effective
value 15A
bit [3]
Battery under-voltage alarm (0: No alarm 1: Alarm) Alarm voltage
22.5V
bit [4]
Reserved, default 0
bit [5]
Reserved, default 0
bit [6]
Reserved, default 0
bit [7]
Reserved, default 0
byte [5]
bit [0]
Battery under-voltage failure (0: No failure 1: Failure) Protective
voltage 22V
bit [1]
Battery over-voltage failure (0: No failure 1: Failure)







































































