

























AgileX Robotics (Dongguan) Co.,Ltd.
26
byte [5]
Reserved
-
0x00
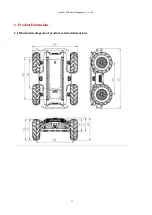
Movement control command
Command Name
Control Command
Sending node
Receiving node
Cycle (ms)
Receive-timeout (ms)
Decision-making control
unit
Chassis node
20ms
500ms
Frame length
0x0A
Command type
Control command (0x55)
Command ID
0x01
Data field length
6
Position
Function
Data type
Description
byte [0]
Control mode
unsigned int8
0x00 Remote control mode
0x01 CAN command control
mode
[1]
0x02 Serial port control mode
See Note 2 for details*
byte [1]
Failure clearing
command
unsigned int8
byte [2]
Linear speed percentage
signed int8
Maximum speed 1.5m/s, value
range (-100, 100)
byte [3]
Angular speed percentage
signed int8
Maximum speed 0.7853rad/s,
value range (-100, 100)
byte [4]
Reserved
-
0x00
byte [5]
Reserved
-
0x00
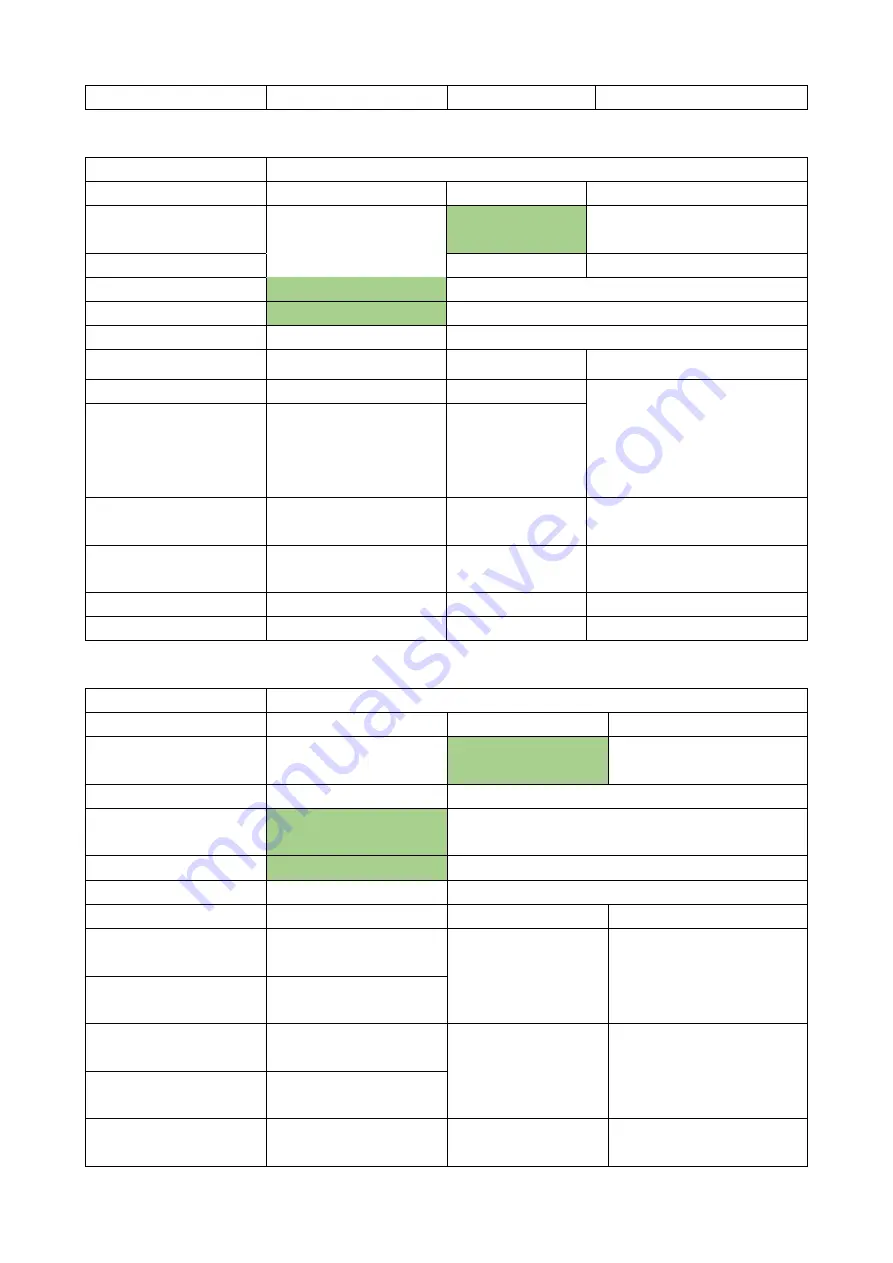
No.1 motor drive information feedback frame
Command Name
No.1 Motor Drive Information Feedback Frame
Sending node
Receiving node
Cycle (ms)
Receive-timeout (ms)
Steer-by-wire chassis
Decision-making control
unit
20ms
None
Frame length
0x0A
Command type
Feedback command
(0xAA)
Command ID
0x03
Data field length
6
Position
Function
Data type
Description
byte [0]
No.1 drive current higher
8 bits
unsigned int16
Actual current X 10 (with an
accuracy of 0.1A)
byte [1]
No.1 drive current lower
8 bits
byte [2]
No.1 drive rotational
speed higher 8 bits
signed int16
Actual motor shaft velocity
(RPM)
byte [3]
No.1 drive rotational
speed lower 8 bits
byte [4]
No.1 hard disk drive
(HDD) temperature
signed int8
Actual temperature (with an
accuracy of 1℃)



































































