


























AgileX Robotics (Dongguan) Co.,Ltd.
25
bit [2]
No.1 motor communication failure (0: No failure 1: Failure)
bit [3]
No.2 motor communication failure (0: No failure 1: Failure)
bit [4]
No.3 motor communication failure (0: No failure 1: Failure)
bit [5]
No.4 motor communication failure (0: No failure 1: Failure)
bit [6]
Motor drive over-temperature protection
[2]
(0: No protection 1:
Protection) Temperature limited to 65℃
bit [7]
Motor over-current protection
[2]
(0: No protection 1: Protection) Current
effective value 20A
[1]: The subsequent versions of robot chassis firmware version after V1.2.8 are supported, but
previous versions need to be updated before supported.
[2]: The over-temperature alarm of motor drive and the motor over-current alarm will not be internally
processed but just set in order to provide for the upper computer to complete certain pre-processing.
If drive over-current occurs, it is suggested to reduce the vehicle speed; if over-temperature occurs, it
is suggested to reduce the speed first and wait the temperature to decrease. This flag bit will be
restored to normal condition as the temperature decreases, and the over-current alarm will be actively
cleared once the current value is restored to normal condition;
[3]: The over-temperature protection of motor drive and the motor over-current protection will be
internally processed. When the temperature of motor drive is higher than the protective temperature,
the drive output will be limited, the vehicle will slowly stop, and the control value of movement
control command will become invalid. This flag bit will not be actively cleared, which needs the
upper computer to send the command of clearing failure protection. Once the command is cleared,
the movement control command can only be executed normally.
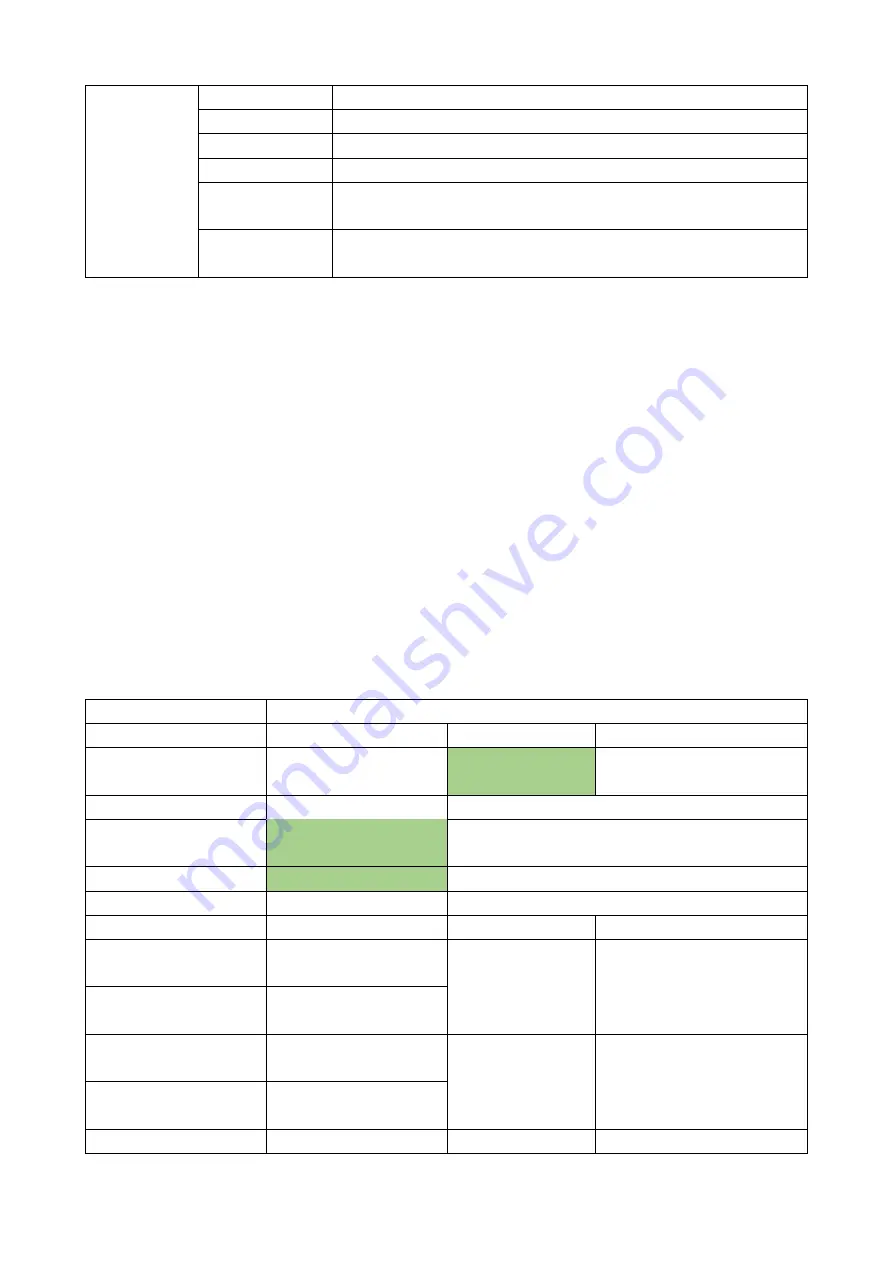
Movement control feedback command
Command Name
Movement Control Feedback Command
Sending node
Receiving node
Cycle (ms)
Receive-timeout (ms)
Steer-by-wire chassis
Decision-making control
unit
20ms
None
Frame length
0x0A
Command type
Feedback command
(0xAA)
Command ID
0x02
Data field length
6
Position
Function
Data type
Description
byte [0]
Moving speed higher 8
bits
signed int16
Actual speed X 1000 (with an
accuracy of 0.001m/s)
byte [1]
Moving speed lower 8
bits
byte [2]
Rotational speed higher 8
bits
signed int16
Actual speed X 1000 (with an
accuracy of 0.001rad/s)
byte [3]
Rotational speed lower 8
bits
byte [4]
Reserved
-
0x00






































































