





























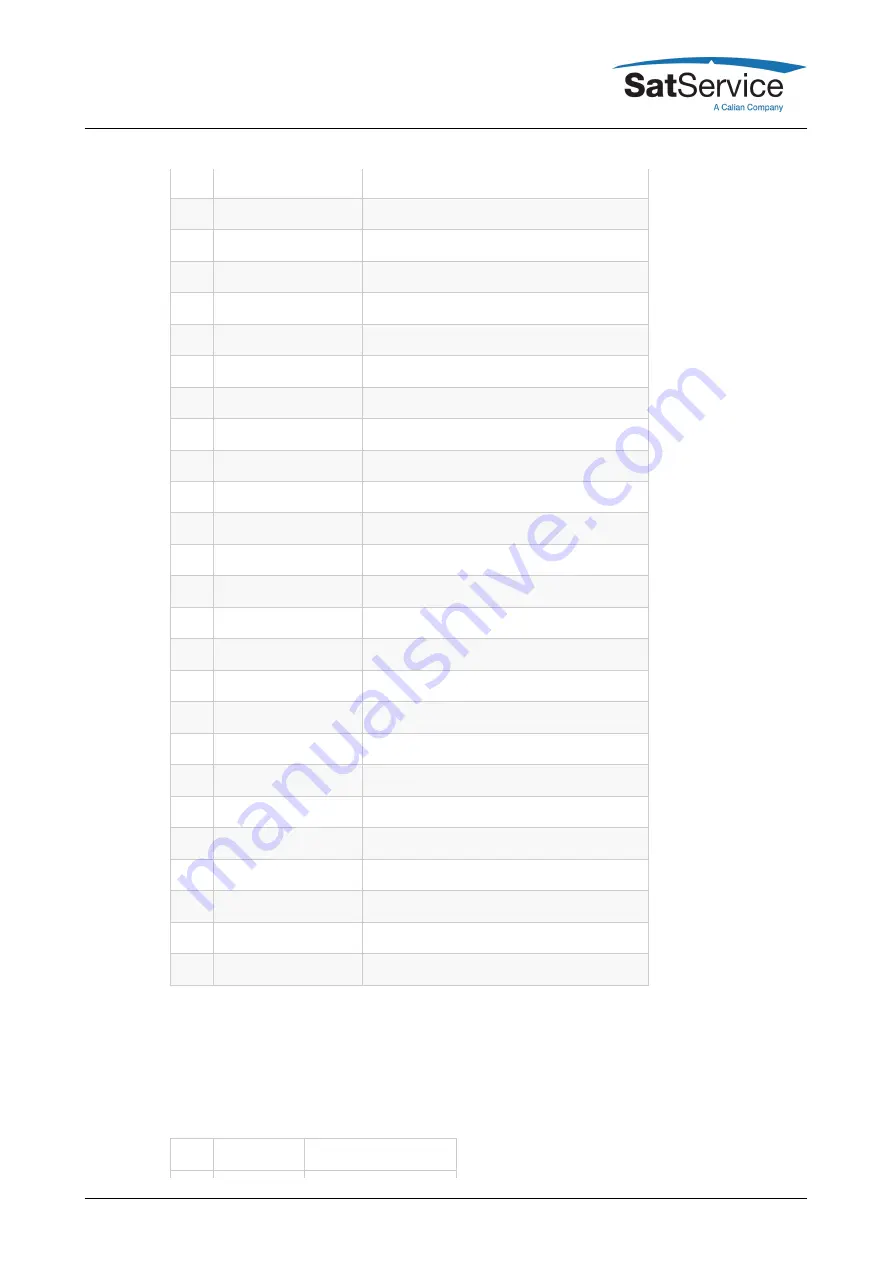
6
OUT_AUX1
not used
7
OUT_AUX2
not used
8
OUT_EL_FWD
elevation motor forward
9
OUT_EL_REV
elevation motor reverse
10
OUT_EL_SPD1
elevation motor low speed
11
OUT_EL_SPD2
elevation motor hi speed
12
OUT_EL_RESET
elevation motor driver reset
13
OUT_EL_RESERVE
reserved for extended motor control
14
OUT_AUX3
not used
15
OUT_AUX4
not used
16
OUT_POL_FWD
polarization motor forward
17
OUT_POL_REV
polarization motor reverse
18
OUT_POL_SPD1
polarization motor low speed
19
OUT_POL_SPD2
polarization motor hi speed
20
OUT_POL_RESET
polarization motor driver reset
21
OUT_POL_RESERVE
reserved for extended motor control
22
OUT_AUX5
not used
23
OUT_AUX6
not used
24
OUT_SUMMARY
summary fault relay (1 == OK)
25
OUT_TRACKING
tracking fault relay (1 == OK)
26
OUT_BCPR1
reserved for beacon receiver frequency select
27
OUT_BCPR2
reserved for beacon receiver frequency select
28
OUT_BCPR3
reserved for beacon receiver frequency select
29
OUT_BCPR4
reserved for beacon receiver frequency select
30
OUT_AUX7
not used
31
OUT_AUX8
not used
The meaning of the 'FWD' / 'REV' motor control outputs depend on the motor control mode set
for this axis.
Bit definitions in 'tflt' (tracking faults):
The 'tflt' value is returned as a 8 bit hexadecimal number. The bit number 0 means the least
significant bit, bit number 7 the most significant bit in this number.
no.
name
description
(C) 2022, SatService GmbH
www.satnms.com
ACU-ODM-UM-2209 Page 57/73







































































