


























Instruction Manual PSx3xxMod
12
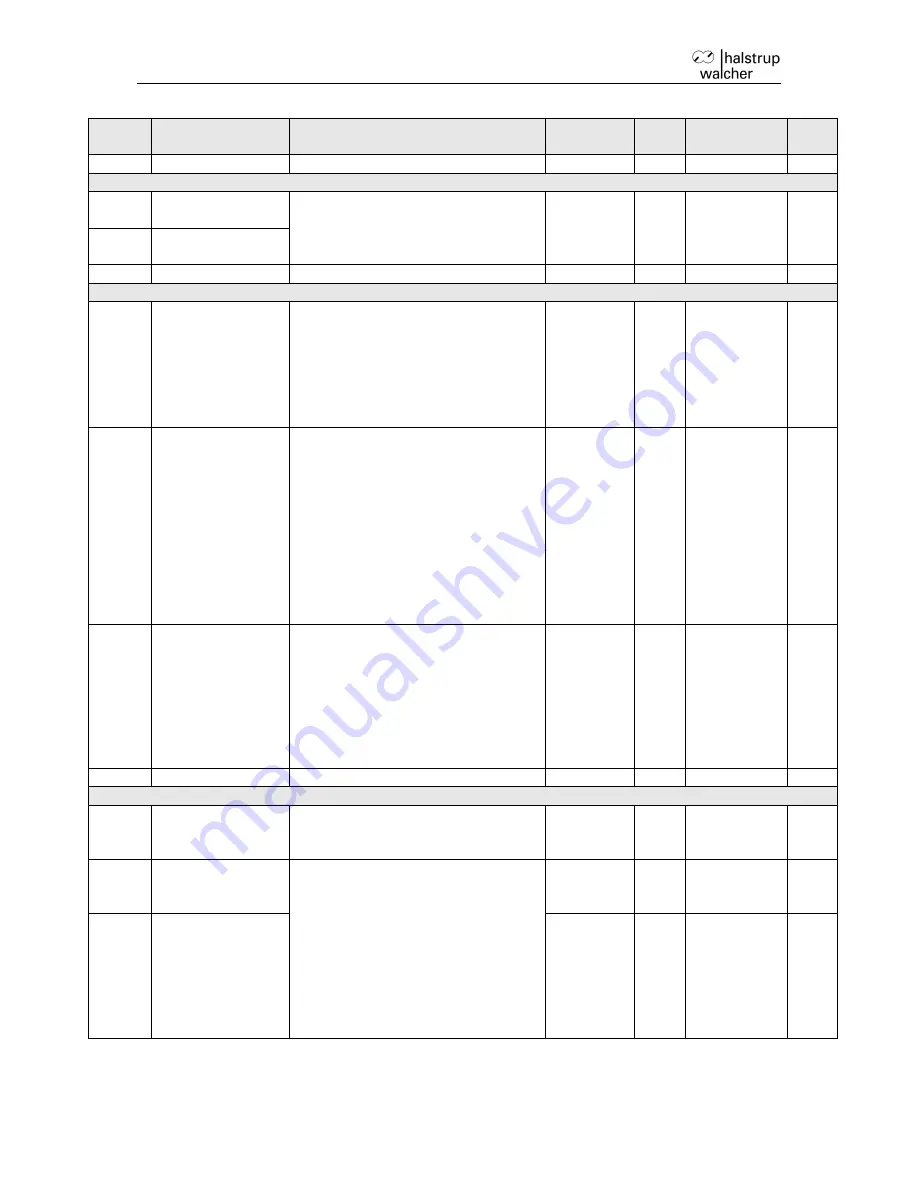
Reg.
Nr.
Name
Function
Type/
Range
Back
up
Delivery
State
R/W
Run commands (continued)
33
target value Hi
(Byte 3-2)
target position to be achieved
value in 1/100 mm (for default
settings of numerator HR 45 and
denominator HR 46)
32 bit
signed
no
0
R/W
34
target value Lo
(Byte 1-0)
35-37
reserved
-
16 bit
no
0
R/W
Bus settings (continued)
38
slave address
address of drive (if set by Modbus)
This value cannot be changed if
the address switches are used (i.e.
the switch setting is > 00). Save
the parameters (set HR 116 to 1)
and restart the device for changes
to take effect.
16 bit
unsigned
1…247
yes
1
R/W
39
baud rate
0: 1200 bps, 1: 2400 bps, 2: 4800
bps, 3: 9600 bps, 4 :19200 bps, 5:
38400 bps, 6: 57600 bps, 7: 76800
bps, 8: 115200 bps
This value cannot be changed if
the baud rate switch is used (i.e.
the switch setting is not OFF-
OFF).
Save the parameters (set HR 116
to 1) and restart the device for
changes to take effect.
16 bit
unsigned
0…8
yes
4
R/W
40
communication
timeout
value in msec
If the value is 0, the timeout
detection is deactivated. A value >
0 sets the time within the master
must send a new and valid request
to keep the connection alive. A
timout in the device will result in
aborting the run.
16 bit
unsigned
0…10000
yes
0
R/W
41-43
reserved
-
16 bit
no
0
R/W
Position settings
44
direction of
rotation
0: clockwise
1: counter clockwise
(if looking at the output shaft)
16 bit
unsigned
0…1
yes
0
R/W
45
actual value
assessment,
numerator
These values can be used to set a
desired user resolution to the
drive.
For a numerator factor of 400, the
denominator factor holds the
spindle pitch per resolution
e.g.: spindle pitch 1.5 mm with
resolution 1/100 mm:
numerator = 400, denominator =
150
16 bit
unsigned
1…10000
yes
400
R/W
46
actual value
assessment,
denominator
16 bit
unsigned
1…10000
yes
400
R/W























































