





























-114-
9.2 Mo Trigger (DefMoTrg, SetMoTrg, M_MoTrg)
The Mo trigger function is used to issue trigger signals when conditions are established based on
conditions defined by combining the following data with a comparison operation. The Mo trigger
status is output to status variable M_MoTrg.
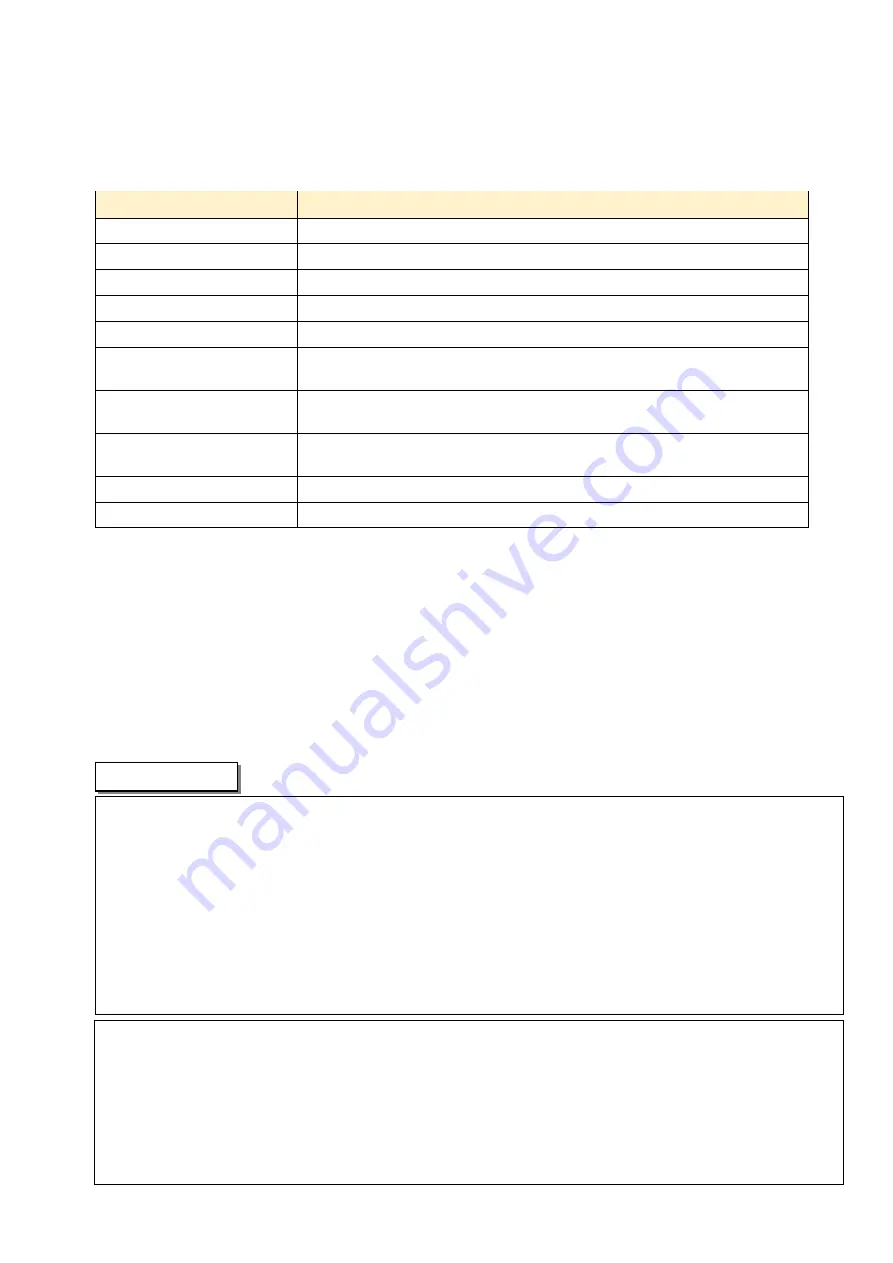
Data
Description
Each P_Curr component
Robot current position (linear data)
Each P_Fbc component
Robot FB position (linear data)
Each J_Curr component
Robot current position (joint data)
Each J_Fbc component
Robot FB position (joint data)
Each P_FsCurP component
Position command after offsetting with force control
Each P_FsCurD component
Force sensor data (values after updating offset cancel, converting tool/XYZ
coordinates)
M_FsRsltF
Force sensor data resultant force (values after updating offset cancel,
converting tool/XYZ coordinates)
M_FsRsltM
Force sensor data resultant moment (values after updating offset cancel,
converting tool/XYZ coordinates)
M_In
Input signal ON/OFF status
M_Out
Output signal ON/OFF status
By using this function, complicated trigger conditions can be specified for use with work completion
judgment/interrupt processing when abnormal work is performed (DEF ACT command), and for changing
force sense control characteristics (FsCTrg command), and so on.
To use the Mo trigger, define trigger conditions with the following procedure, and then start condition
monitoring.
<Mo trigger setting procedure flow>
(1)
Define trigger conditions with the Def MoTrg command. Up to three types of conditions can be set.
(2)
Enable the Mo trigger with the SetMoTrg command.
(3)
Perform condition branching and interrupt processing using values output to status variable M_MoTrg.
* Procedures (2) and (3) are unnecessary if using FsCTrg command.
Program example
Def MoTrg
1,
((P_Fbc.Z <= 5) AND (P_FsCurD.Z > 18))
'Define work complete conditions for Mo trigger #1.
Def Act 1, M_MoTrg(1)=1 GoTo *XOK, F
'Define Mo trigger #1 as interrupt condition.
Mvs PStart
'Move the robot above the insert position.
Set MoTrg 1
'Enable Mo trigger #1.
Fsc On, 0, 0, 1
'Enable force sense control.
Act 1=1
• • • • • •
Fsc Off
'Disable force sense control.
Act 1=0
Set MoTrg 0
'Disable Mo trigger.
End
Def MoTrg 3, (P_Fbc.Z < 100)
'Work complete conditions defined for Mo trigger 3.
Fsc On, 0, 1, 1
'Enable force sense control.
FsCTrg 3, 100, 2
'Enable Mo trigger #3 and change the control characteristics
from 1 to 2 when the trigger turns ON.
Mvs P1
• • • • • •
Fsc Off
'Disable force sense control.
End
Summary of Contents for MELFA BFP-A3614
Page 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Page 2: ......
Page 34: ... 23 2 F series a CR750 D controller ...
Page 35: ... 24 b CR751 D controller ...
Page 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Page 75: ... 64 MEMO Please use this page for your memo ...
Page 95: ... 84 MEMO Please use this page for your memo ...
Page 103: ... 92 MEMO Please use this page for your memo ...
Page 111: ... 100 MEMO Please use this page for your memo ...
Page 119: ... 108 MEMO Please use this page for your memo ...
Page 123: ... 112 MEMO Please use this page for your memo ...
Page 129: ... 118 MEMO Please use this page for your memo ...
Page 133: ... 122 MEMO Please use this page for your memo ...
Page 137: ... 126 MEMO Please use this page for your memo ...
Page 143: ... 132 MEMO Please use this page for your memo ...
Page 149: ... 138 MEMO Please use this page for your memo ...
Page 153: ... 142 MEMO Please use this page for your memo ...
Page 159: ... 148 MEMO Please use this page for your memo ...
Page 171: ... 160 MEMO Please use this page for your memo ...
Page 183: ... 172 MEMO Please use this page for your memo ...
Page 191: ... 180 MEMO Please use this page for your memo ...
Page 211: ......







































































