

























RDAIRPABPSI5UG , Rev. 2.0
36
Freescale Semiconductor, Inc.
Installing the Software and Setting up the Hardware
•
Acc_X_OffsetOverRange - the offset monitor over range flag is set if the acceleration signal of the X axis reaches
the specified offset limit
•
Acc_Y_OffsetOverRange - the offset monitor over range flag is set if the acceleration signal of the Y axis reaches
the specified offset limit
•
Acc_SpiMisoError - the MISO data mismatch flag is set when a MISO Data mismatch fault occurs
•
Acc_DeviceInitFlag - the device initialization flag is set during the interval between negation of internal reset and
completion of internal device initialization
•
Acc_SigmaDeltaOverRange - the sigma delta modulator over range flag is set if the sigma delta modulator for either
axis becomes saturated
•
Acc_InterDataError - the internal data error flag is set if a customer or OTP register data CRC fault or other internal
fault is detected
•
Acc_FuseWarning - the fuse warn bit is set if a marginally programmed fuse is detected
•
Acc_CountValue - value in the register increases by one count every 128 us
and the counter rolls over every
32.768 ms
Parameters of the Acc_ProgramCmd API function:
•
Spi_Channel (Acc_SpiChannelType) - logical SPI channel number (not physical SPI channel)
•
RegAddress (unit16) - address of the selected IC register
•
Data (unit16) - data
•
SpiResponse (unit16) - response to the sent command
6.6 SQUIB Driver
The SQUIB driver is created as a separate software module. The main advantage is full HW abstraction and API independence used in
the MCU family. The driver API covers the entire functionality of the squib driver, which means all firing commands and devices statuses
can be controlled by API functions.
The SQUIB Driver is dependent on the BSD layer (basic SPI communication) and on the GPIO driver (General Purpose Input/Output),
which provides basic functions for reading status on the arming pins.
6.6.1
SQUIB API Parameters Detail Descriptions
A brief description of input and output API parameters is in the following paragraphs. Descriptions contain only a written description of the
parameter. Values which each variable acquires are described in the header file MC33797.h.
Parameters of the Squib_Init API function:
•
Spi_Channel (Squib_SpiChannelType) - logical SPI channel number (not physical SPI channel)
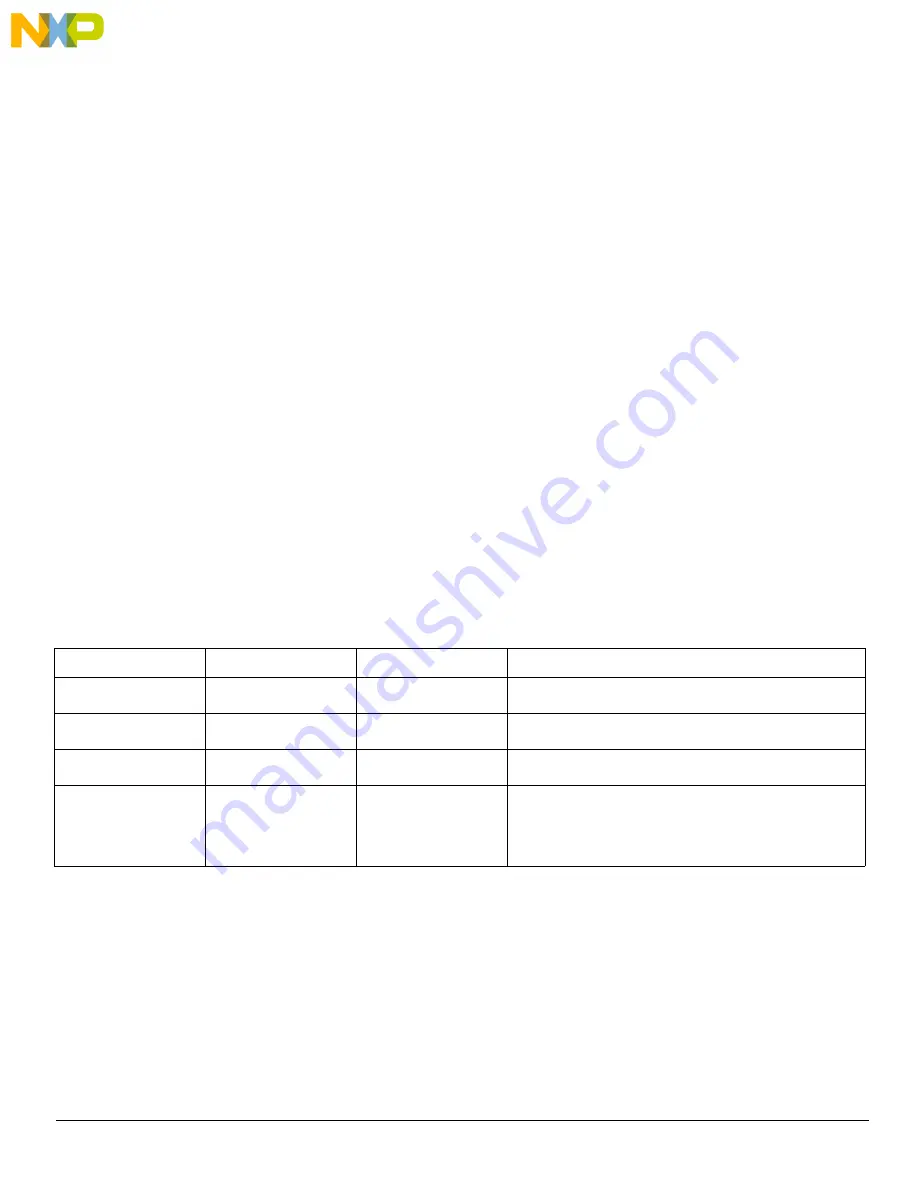
Table 24: SQUIB SW Driver API
Function Name
Function Parameters
Return Type
Function Description
Squib_Init
Spi_Channel [in]
Squib_ReturnType
Initialize the SQUIB device and returns the confirmation of the
initialization.
Squib_Fire
Spi_Channel [in]
Squib_Fire [in]
Squib_ReturnType
This function provide explosion of the selected SQUIB driver
Squib_GetStatus
Spi_Channel [in]
*Status [out]
Squib_ReturnType
Return the status of the SQUIB drivers (1A, 1B, 2A and 2B) and
common status of the SQUIB IC.
Squib_ProgramCmd
Spi_Channel [in]
Command [in] Data [in]
Delay [in] SpiResponse
[out]
Squib_ReturnType
Send any SQUIB command to the IC device and read its response.







































































