


























byte [4]
Reserved
0x00
byte [5]
Reserved
0x00
byte [6]
byte [7]
The angle is 8 bits
higher
The angle is 8 bits
lower
Signed int16
Actual inner angle X1000 (unit: 0.001rad)
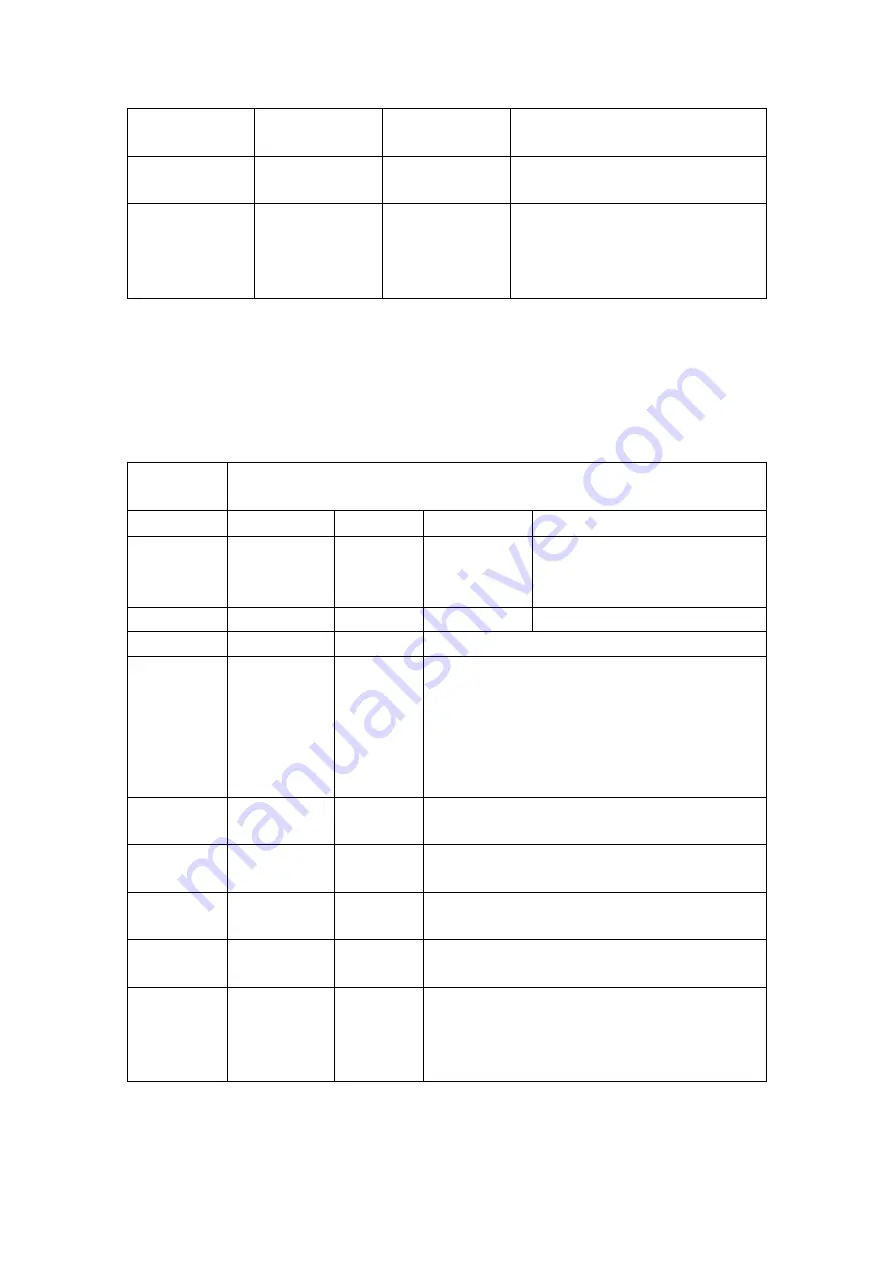
The movement control frame includes the linear velocity control command and the front wheel inner angle control
command. The specific protocol content is shown in Table 3.3.
Table 3.3 Movement Control Feedback Frame
Command
Name
System Status Feedback Command
Sending node
Receiving node
ID
Cycle
(
ms
)
Receive time-out (ms)
Decision-mak
ing control
unit
Chassis node
0x111
20ms
500ms
Data length
0x08
Position
Function
Data type
Description
byte [0]
byte [1]
The linear
velocity is 8
bits higher
The linear
velocity is 8
bits lower
signed
int16
Moving speed of vehicle body, unit: mm/s
(
effective value: +
-4800)
byte [2]
Reserved
—
0x00
byte [3]
Reserved
—
0x00
byte [4]
Reserved
—
0x00
byte [5]
Reserved
—
0x00
byte [6]
byte [7]
The angle is 8
bits higher
The angle is 8
bits lower
signed
int16
Steering inner angle unit: 0.001rad (effective value +-400)
PS: In the CAN command mode, it is necessary to ensure that the 0X111 command frame is sent in a period less
than 500MS (recommended period is 20MS), otherwise HUNTER SE will judge that the control signal is lost and



























































