























is 8 bits lower
byte [2]
byte [3]
The motor
current is 8 bits
higher
The motor
current is 8 bits
lower
signed int16
Motor current Unit 0.1A
byte [4]
byte [5]
byte [6]
byte [7]
Reserved
--
0
×
00
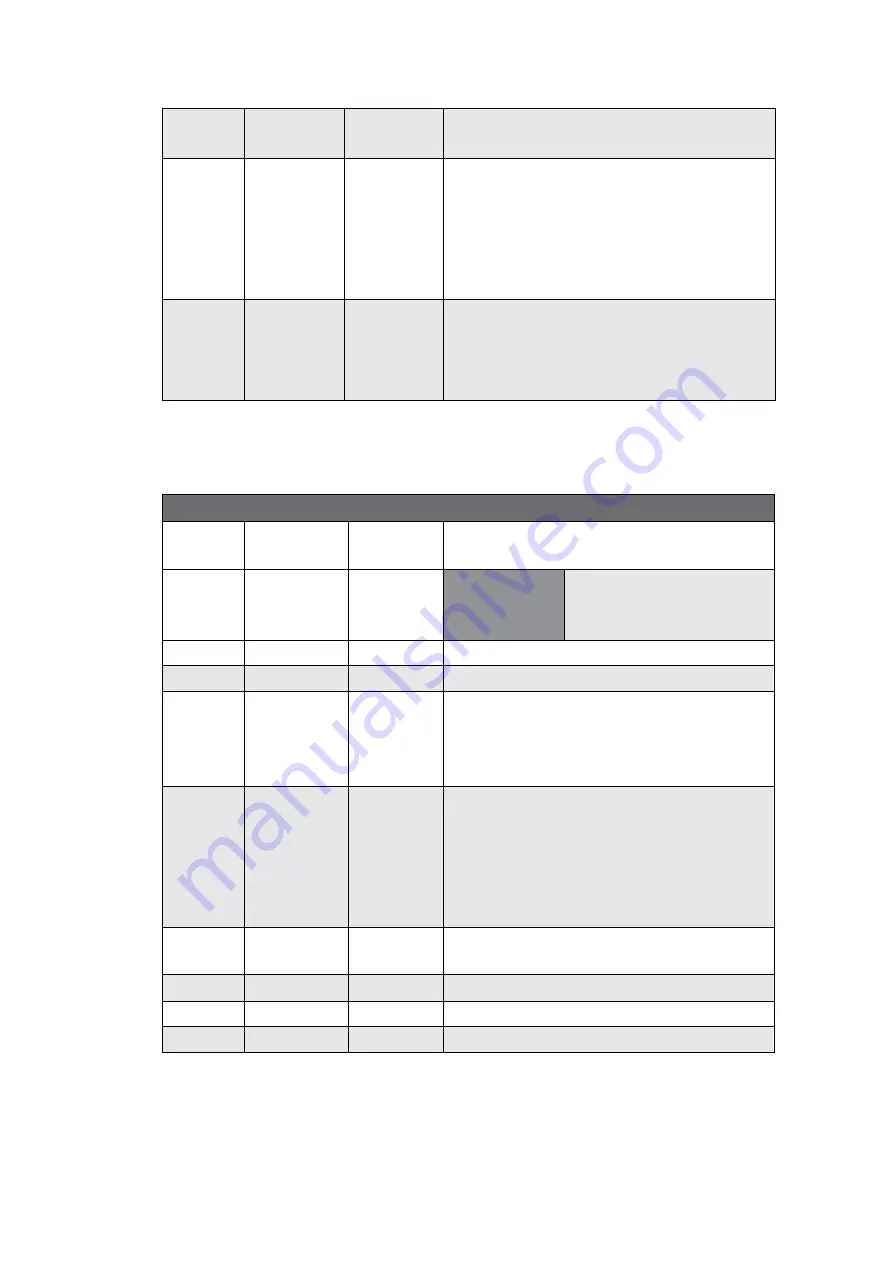
Table 3.7 Motor Drive Low Speed Information Feedback Frame
Command Name otor Drive Low Speed Information Feedback Frame
Sending
node
Receiving node
ID
Cycle
(
ms
)
Receive time-out (ms)
Steer-by-wir
e chassis
Decision-making
control unit
0x261~0x263
100ms
None
Data length
0x08
Position
Function
Data type
Description
byte [0]
byte [1]
The drive voltage
is 8 bits higher
The drive voltage
is 8 bits lower
unsigned int16
Current drive voltage Unit 0.1V
byte [2]
byte [3]
The drive
temperature is 8
bits higher
The drive
temperature is 8
bits lower
signed int16
Unit 1
℃
byte [4]
Motor
temperature
signed int8
Unit 1
℃
byte [5]
Drive status
unsigned int8
See the details in [Drive control status]
byte [6]
Reserved
—
0x00
byte [7]
Reserved
—
0x00
The specific content of the drive status information is shown in Table 3.8.





































































