





























GeoCOM Reference Manual
Automation - AUT
Leica TPS1200 / TS30 / TM30 – Version 1.50
49
7.4.5
AUT_MakePositioning - turning the telescope to a specified position
AUT_MakePositioning..............................................................................................................................................................................................................................................................................
tioning
........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................ 9027
9027 ................................................................................................................................................................................................................................................................AUT_MakePosi
C-Declaration
AUT_MakePositioning(double Hz,
double V,
AUT_POSMODE POSMode,
AUT_ATRMODE ATRMode,
BOOLE bDummy)
VB-Declaration
VB_AUT_MakePositioning4(Hz As Double,
V As Double,
POSMode As Long,
ATRMode As Long,
bDummy As Boolean)
ASCII-Request
%R1Q,9027:
Hz,V,PosMode,ATRMode,0
ASCII-Response
%R1P,0,0:
RC
Remarks
This procedure turns the telescope absolute to the in
Hz
and
V
specified position, taking tolerance settings for
positioning (see
AUT_POSTOL
) into account. Any active control function is terminated by this function call.
If the position mode is set to normal (
PosMode = AUT_NORMAL
) it is assumed that the current value of the
compensator measurement is valid. Positioning precise (
PosMode = AUT_PRECISE
) forces a new compensator
measurement at the specified position and includes this information for positioning.
If ATR mode is activated and the ATR mode is set to
AUT_TARGET,
the instrument tries to position onto a target
in the destination area.
If LOCK mode is activated and the ATR mode is set to
AUT_TARGET,
the instrument tries to lock onto a target
in the destination area.
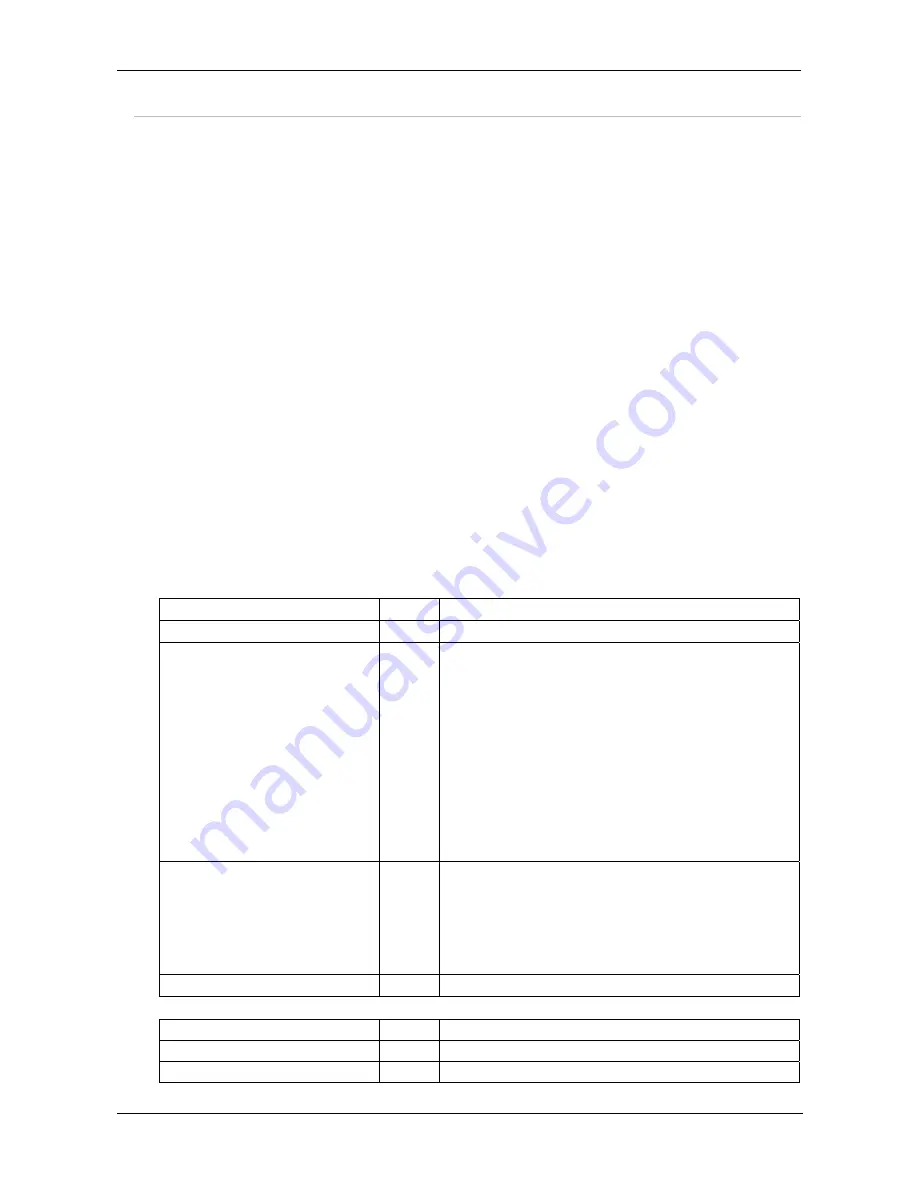
Parameters
Hz In
Horizontal (instrument) position [
rad
].
V In
Vertical (telescope) position [
rad
].
POSMode In
Position mode:
AUT_NORMAL:
(default) uses the current value of the
compensator (no compensator measurement while
positioning). For positioning distances >25GON
AUT_NORMAL
might tend to inaccuracy.
AUT_PRECISE
: tries to measure exact inclination of target.
Tend to longer position time (check
AUT_TIMEOUT
and/or
COM-time out if necessary).
AUT_Fast:
for TS30 / TM30 instruments, positions with
the last valid inclination and an increased positioning
tolerance. Suitable in combination with
ATRMode
AUT_Target
.
ATRMode In
Mode of ATR:
AUT_POSITION
: (default) conventional position using values
Hz
and
V
.
AUT_TARGET
: tries to position onto a target in the destination
area. This mode is only possible if ATR exists and is
activated.
bDummy In
It’s reserved for future use, set
bDummy
always to
FALSE
Return-Code Names and Return-Code Values
GRC_OK
0 Execution
successful.
GRC_NA
27
GeoCOM Robotic license key not available
GRC_IVPARAM
2
Invalid parameter (e.g. no valid position).































































