





























GeoCOM Reference Manual
Automation - AUT
Leica TPS1200 / TS30 / TM30 – Version 1.50
54
7.4.7
AUT_FineAdjust - automatic target positioning
AUT_FineAdjust ............................................................................................................................................................................................................................................................................
t
.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... 9037
9037 ................................................................................................................................................................................................................................................................AUT_FineAdjus
C-Declaration
AUT_FineAdjust( Double dSrchHz,
double dSrchV ,
BOOLE bDummy)
VB-Declaration
VB_AUT_FineAdjust3( DSrchHz As Double,
dSrchV As Double,
bDummy As Boolean)
ASCII-Request
%R1Q,9037:
dSrchHz
[double],
dSrchV
[double],0
ASCII-Response
%R1P,0,0:
RC
Remarks
This procedure precisely positions the telescope crosshairs onto the target prism and measures the ATR Hz and
V deviations. If the target is not within the visible area of the ATR sensor (Field of View) a target search will be
executed. The target search range is limited by the parameter
dSrchV
in V- direction and by parameter
dSrchHz
in Hz - direction. If no target found the instrument turns back to the initial start position.
A current Fine Adjust LockIn towards a target is terminated by this procedure call. After positioning, the lock
mode is active. The timeout of this operation is set to 5s, regardless of the general position timeout settings. The
positioning tolerance is depends on the previously set up the fine adjust mode (see
AUT_SetFineAdjustMoed
and
AUT_GetFineAdjustMode
).
Tolerance settings (with
AUT_SetTol
and
AUT_ReadTol
) have no influence to this operation. The tolerance
settings as well as the ATR measure precision depends on the instrument’s class and the used EDM measure
mode (The EDM measure modes are handled by the subsystem TMC).
Parameters
DSrchHz In
Search range Hz-axis [rad]
DSrchV In
Search range V-axis [rad]
bDummy In
It’s reserved for future use, set
bDummy
always to FALSE
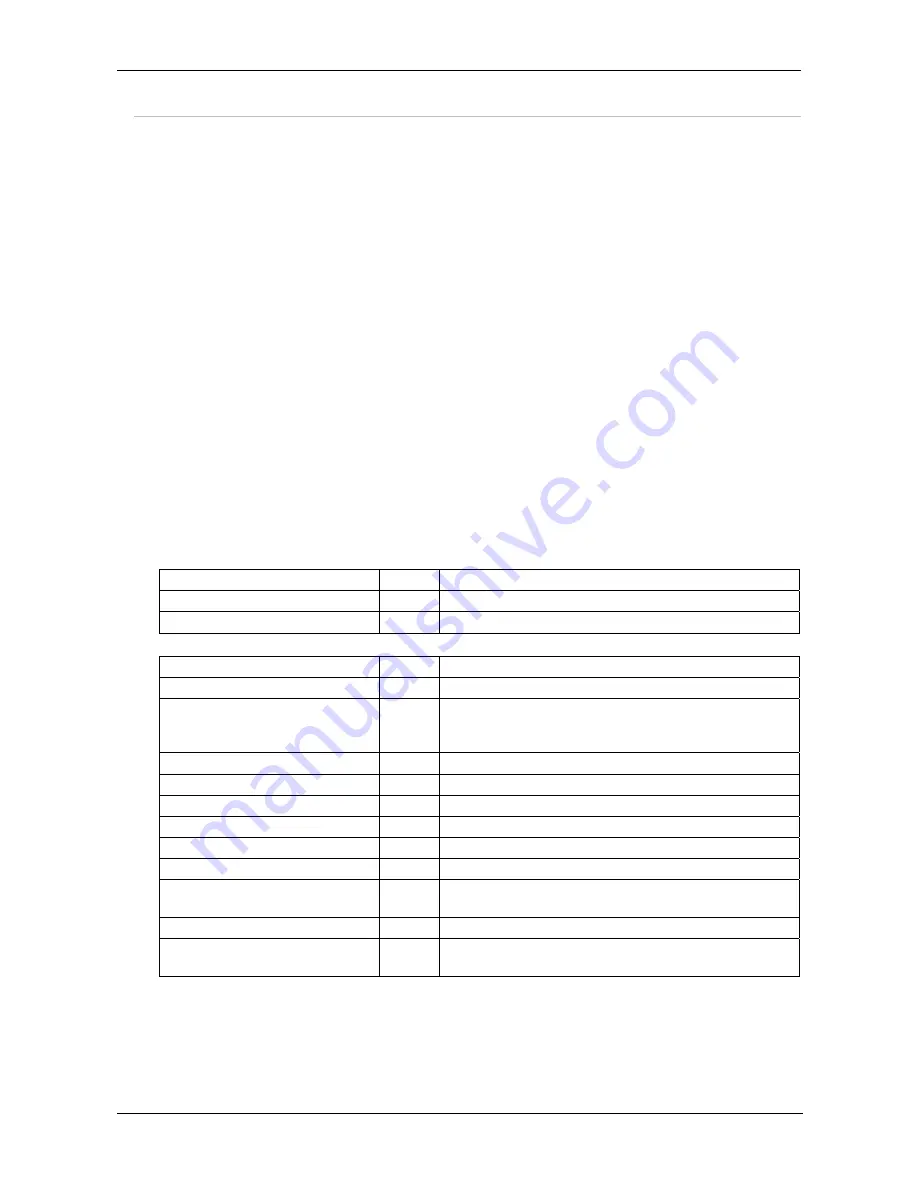
Return-Code Names and Return-Code Values
GRC_OK
0 Execution
successful.
GRC_NA
27
GeoCOM Robotic license key not available
GRC_AUT_TIMEOUT
8704
Timeout while positioning of one or both axes. The position
fault lies above 100[cc]. (perhaps increase AUT timeout, see
AUT_SetTimeout
)
GRC_AUT_MOTOR_ERROR
8707
Instrument has no ‘motorization’.
GRC_FATAL
4 Fatal
error.
GRC_ABORT
8 Function
aborted.
GRC_AUT_NO_TARGET
8710
No target found.
GRC_AUT_MULTIPLE_TARGETS
8711
Multiple targets found.
GRC_AUT_BAD_ENVIRONMENT
8712
Inadequate environment conditions.
GRC_AUT_DEV_ERROR
8716
During the determination of the angle deviation error
detected, repeat fine positioning
GRC_AUT_DETECTOR_ERROR
8713
Error in target acquisition.
GRC_COM_TIMEDOUT
3077
Communication time out. (perhaps increase COM timeout,
see
COM_SetTimeout
)
See Also
AUS_SetUserAtrState
AUS_GetUserAtrState
AUT_SetFineAdjustMode
AUT_GetFineAdjustMode
Example
GRC_TYPE Result;
ON_OFF_TYPE ATRState;































































