



























40
(2) Setting Method
This function is working only in absolute position value. The position error can happen
due to the work status in push mode. Push motion command can be executed by 2
methods. One is RS-485 communication(DLL library) method and the other is external
digital signal(PT Start command) method.
①
DLL library method
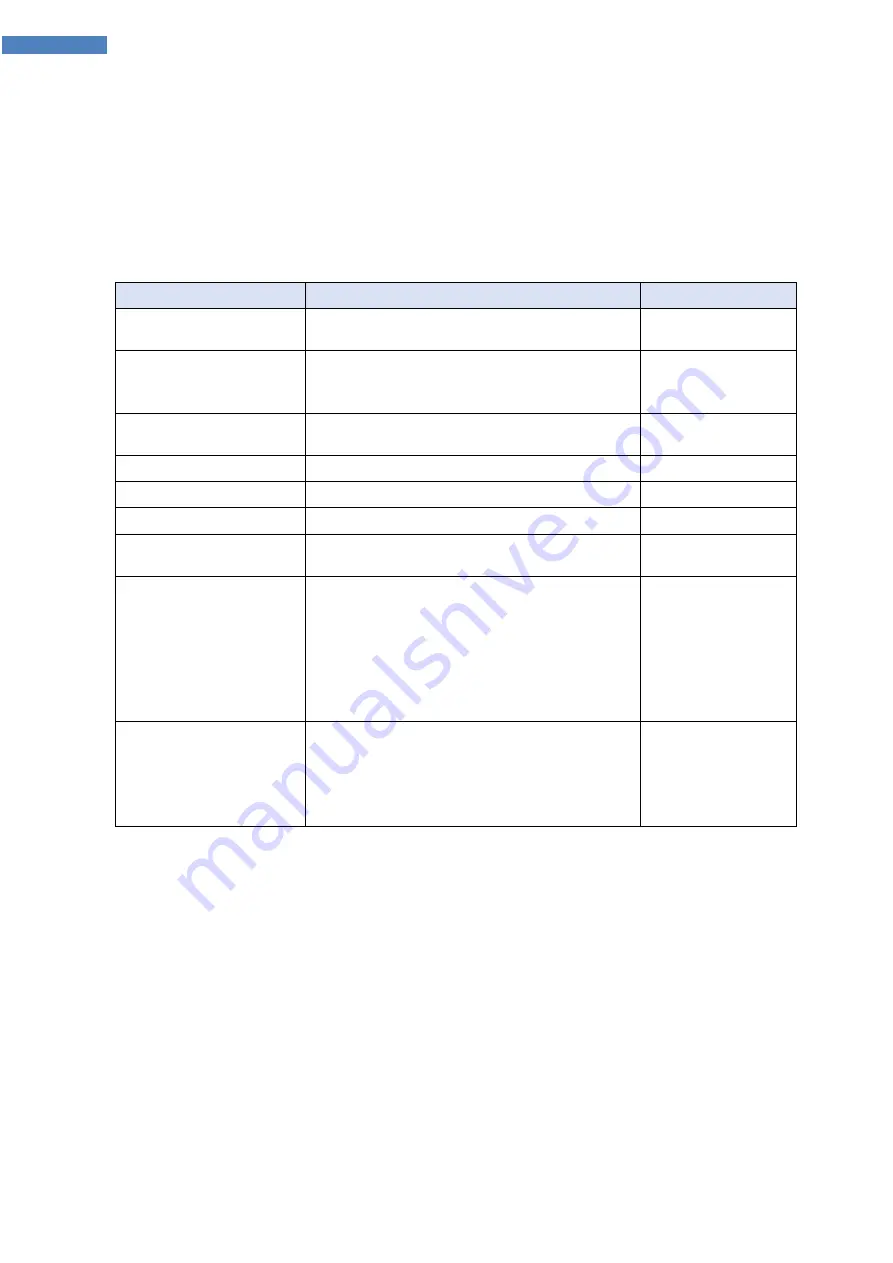
The following table shows the setting conditions and refer to
‘
CK10_UserManual_Communication Function_MODBUS
’.
Setting Item
Description
Range *1
Position motion/ Start
speed
Start speed value of position motion
1~35000[pps]
Position motion/
Moving
speed
Moving speed of position motion
1~500000[pps]
Position mode/ Target
Position
Absolute target position of position
command
-2,147,483,648 ~
2,147,483,647
Accel time
Accel time of position motion
1~9,999[ms]
Deceleration time
Decelerate time of position motion
1~9,999[ms]
Push ratio
Motor torque value in push mode
20~90[%]
Push motion/ Moving
speed
Moving speed of Push motion (max
400[rpm])
1~66000[pps]
Push motion/ Target
position
Absolute target position of push command
*Non-stop mode : the value must be set
more than ‘ Position command Target
Position’ value.
*The motor will stop if the position is
exceed this
value even if the work is not detected.
-2,147,483,648 ~
2,147,483,647
Push mode
Set Stop mode(0) or Non-stop
mode(1~10000) after the work detect. In
case of Non-stop mode, the motor move
backward as much as this
value[pulse].
0~10,000
*1 : The unit of [pps] in this item is referenced to 10,000[ppr] encoder.
②
Input signal(PT Start) Method
Firstly the position table data must be entered before the push motioning and
refer to ‘
CK10_UserManual_Position Table
’ .







































































