

















34
RESET
24
The integral time constant, in seconds per repeat.
Float
SRC
4
R/W
Positive
+INF
BAL_TIME
25
This specifies the time for the internal working value of bias
or ratio to return to the operator set bias or ratio, in seconds.
In the PID block, it may be used to specify the time constant
at which the integral term will move to obtain balance when
the output is limited and the mode is Auto, Cas, or RCas.
Float
SRC
4
R/W
Positive
0
RATE
26
Defines the derivative time constant, in seconds.
Float
SRC
4
R/W
Positive
0
BKCAL_IN
27
The value and status from a lower block’s BKCAL_OUT that
is used to prevent reset windup and to initialize the control
loop.
DS-65
N
5
R/W
OUT_HI_LIM
28
Limits the maximum output value.
Float
SRC
4
R/W
OUT_SCALE
±10%
100
OUT_LO_LIM
29
Limits the minimum output value.
Float
SRC
4
R/W
OUT_SCALE
±10%
0
BKCAL_HYS
30
The amount that the output must change away from its out-
put limit before the limit status is turned off, expressed as a
percent of the span of the output.
Float
SRC
4
R/W
0
50
0.5
BKCAL_OUT
31
The value and status required by an upper block’s BKCAL_IN
so that the upper block may prevent reset windup and pro-
vide bumpless transfer to closed loop control.
DS-65
D
5
RO
RCAS_IN
32
Target setpoint and status provided by a supervisory Host to
a analog control or output block.
DS-65
N
5
R/W
ROUT_IN
33
Target output and status provided by a Host to the control
block for use as the output (ROut mode).
DS-65
N
5
R/W
SHED_OPT
34
Defines action to be taken on remote control device timeout.
Un-
signed
8
SRC
1
R/W
0
RCAS_OUT
35
Block setpoint and status after ramping - provided to a super-
visory Host for back calculation and to allow action to be
taken under limiting conditions or mode change.
DS-65
D
5
RO
ROUT_OUT
36
Block output and status - provided to a Host for back calcu-
lation in ROut mode and to allow action to be taken under
limited conditions or mode change.
DS-65
D
5
RO
TRK_SCALE
37
The high and low scale values, engineering units code, and
number of digits to the right of the decimal point, associated
with TRK_VAL.
DS-68
SRC
11
R/W
0-100%
TRK_IN_D
38
This discrete input is used to initiate external tracking of the
block output to the value specified by TRK_VAL.
DS-66
N
2
R/W
TRK_VAL
39
This input is used as the track value when external tracking
is enabled by TRK_IN_D.
DS-65
N
5
R/W
FF_VAL
40
The feed forward value and status.
DS-65
N
5
R/W
FF_SCALE
41
The feedforward input high and low scale values, engineering
units code, and number of digits to the right of the decimal
point.
DS-68
SRC
11
R/W
0-100%
FF_GAIN
42
The gain that the feed forward inpt is multiplied by before it
is added to the calculated control output.
Float
SRC
4
R/W
0
UPDATE_EVT
43
This alert is generated by any change to the static data.
DS-73
D
14
RO
BLOCK_ALM
44
The block alarm is used for all configuration, hardware, con-
nection failure or system problems in the block. The cause
of the alert is entered in the subcode field. The first alert to
become active will set the Active status in the Status attrib-
ute. As soon as the Unreported status is cleared by the alert
reporting task, another block alert may be reported without
clearing the Active status, if the subcode has changed.
DS-72
D
13
R/W
ALARM_SUM
45
The current alert status, unacknowledged states, unreported
states, and disabled states of the alarms associated with the
function block.
DS-74
Mix
8
R/W
ACK_OPTION
46
Selection of whether alarms associated with the block will be
automatically acknowledged.
0 = Auto Ack Disabled; 1 = Auto Ack Enabled.
Bit
String
SRC
2
R/W
0
1
0
ALARM_HYS
47
Amount the PV must return within the alarm limits before
the alarm condition clears. Alarm Hysteresis is expressed as a
percent of the PV span.
Float
SRC
4
R/W
0
50
0.5
HI_HI_PRI
48
Priority of the high high alarm.
Un-
signed
8
SRC
1
R/W
0
15
0
HI_HI_LIM
49
The setting for high high alarm in engineering units.
Float
SRC
4
R/W
PV_
SCALE
+INF
+INF
HI_PRI
50
Priority of the high alarm.
Un-
signed
8
SRC
1
R/W
0
15
0
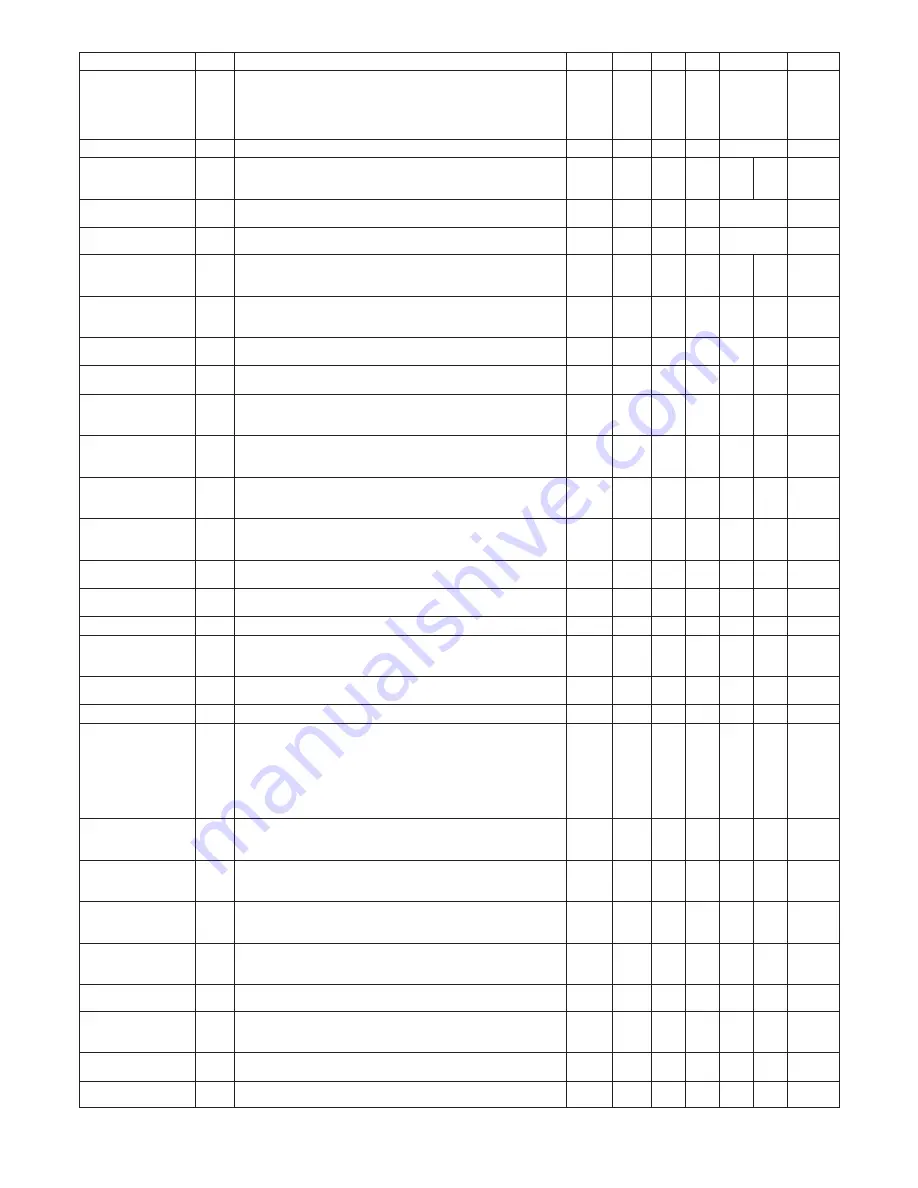
Parameter
Rel.
Index Description
Type Store Size
byte
RO /
R/W Min. Max. Default
HI_LIM
51
The setting for high alarm in engineering units.
Float
SRC
4
R/W
PV_
SCALE
+INF
+INF







































































