





















-13-
6.2.2 OPEN LOOP CONTROL PARAMETERS
6.2.2.1 CMD UNITS
This is a four character label that will be displayed with the
input command and it’s associated parameters. It is entirely
configurable by the operator. When selected for update, the
first of the four characters is highlighted. The
↑
/
↓
selections
are used to scroll through the available characters: A-Z, a-z,
space, -, % and /. Selecting
E
nter will set the displayed character
and continue to the next. When all four characters have been
set, the label is saved. At anytime prior to the final character
being set,
C
ancel may be selected and no change to the label
will be made.
6.2.2.2 CMD MAX
This is the input reading that is to be associated with the
maximum input signal of 20ma or 5V.
6.2.2.3 CMD MIN
This is the input reading that is to be associated with the
minimum input signal of 4ma or 1V.
6.2.2.4 CMD DAMP
Dampening is the amount of time over which the command
input signal is averaged. The setting may range from 0
seconds (no dampening) to 25 seconds. This is used to
smooth out rapid fluctuations of the input signal.
6.2.2.5 CMD LO ALRM
This is the level that signifies a low input command. When
the input command falls below this level, an alarm is
generated.
6.2.2.6 CMD ALRM DB
This parameter determines when the CMD LO ALRM is
cleared. The input command reading must rise above the
alarm level by this amount in order for the system to clear an
existing low command alarm. The parameter may be set
from 0.3% to 25% of the Input command range.
6.2.2.7 CMD LOS ACT
This is the action taken when the input command is lost. It
may be configured as
LOCK – actuator locks in place at its current position
DTZ – actuator drives to the Zero position
DTS – actuator drives to the Span position
DTP – actuator drives to a user selected position
6.2.2.8 CMD LOS POS
This is the position to which the actuator will drive when the
CMD LOST ACT parameter is set to Drive To Position and
the signal is lost.
6.2.2.9 LOC/REM RADIO
This parameter configures whether the RATIO multiplier of
the system is obtained locally when set to LOCAL, or if it is
obtained from the input signal (on input pair number 3)
when set to REMOTE.
SOFTWARE SETUP
Configuration
6.1 Basic Parameters
6.1.1 DEADBAND
This adjustment establishes the servo sensitivity. It is factory
set but may be adjusted, if necessary, in the field. If the
actuator begins to oscillate (rapidly adjusting around a single
point) the sensitivity can be decreased. Increase the
deadband parameter until the oscillation no longer occurs.
Oscillation will reduce the life of the unit.
6.1.2 SPEED
LINEAR SPEED
This is the speed at which the unit moves in a linear direc-
tion. It may be set to either .13 or .25 inches/second.
ROTARY SPEED
This is the selection to set the rotary speed of the actuator.
It is adjustable between TBD. There are no units associated
with this parameter other than those the operator desires to
use. See SPEED UNITS parameter.
6.1.3 SPEED UNITS
This parameter is available only for rotary actuators. It is a
four-character user programmable unit string to associate with
the speed parameter.
6.1.4 ACUATOR TYPE
This parameter configures the unit as linear or rotary.
6.2 Control Setup
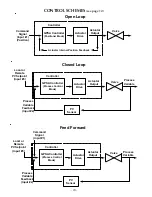
6.2.1 CONTROL MODE SELECTION
This selects the control mode that the actuator uses to
determine its output position:
6.2.2 OPEN LOOP:
(See page 19 for diagram)
In this mode the output position is directly proportional to
the input command provided on input terminal pair #1.
6.2.3 CLOSED LOOP:
(See page 19 for diagram)
This strategy is integral based and adjusts the output position
of the actuator based on the difference between a desired
local or remote Set Point (terminal pair #3) and the actual
Process variable signal on terminal pair #2. This adjustment
is added incrementally over a specified integral time. The
amount of the correction is continually calculated/updated.
6.2.4 FEED FORWARD:
(See page 19 for diagram)
This mode combines the control strategies of proportional
and process variable control mentioned above. The output
setting is adjusted in proportion to the input command on
terminal pair #1 and a correction factor is applied which is
derived from the error between the desired local or remote
Set Point (terminal pair #3) and the actual input signal on
input terminal pair #2.







































































