



















-16-
SOFTWARE SETUP
6.2.4.14 PROPOR GAIN
This is the gain applied in the PI control loop of the Process
Variable control scheme. It tells the actuator what
percentage of the difference between the Set Point and the
Process Variable signals to use as the step up or down. The
percentage is equal to 100 divided by the PROPOR GAIN
setting. It may be set from 0 to 255%. A gain setting of
100% results in the step up or down being equal to the
difference of the two signals.
6.2.4.15 INTEGRAL TIME
This is the time over which the correction of the PI control
loop is applied to the system. It ranges from 0 to 60
minutes. The correction to be made to the system is
calculated and it is applied incrementally over the Integral
time. The correction and the size of its incremental
application is continually calculated and applied to the
system. A setting of 0 minutes would apply any required
correction immediately rather than spread out over a period
of time.
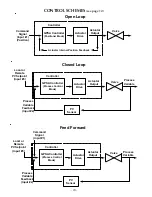
6.2.4.16 CMD CHANGE TIME
This parameter controls the time period over which the
correction factor caused by a change in the input command
is applied to the system during Feed Forward control. For
instance, if the input command is changed by 25% and the
CMD CHNG TIME parameter is set to 30 seconds; incre-
mental changes will be made to the system each control
cycle to incorporate the correction over time so that it is fully
implemented after 30 seconds.
6.2.4.17 CMD-POS VARI
This is the percent difference of input command and the
position that if exceeded will trigger a recalculation of the
correction factor applied during Feed Forward Control.
6.2.4.18 CMD CHNG VARI
This is the percent difference of the current command and
the input command when the last correction factor was
calculated that if exceed will trigger a recalculation of
correction factor applied during Feed Forward control.
6.2.4.19 CMD DEADBAND
This is the amount the command may change without
causing the system to accumulate any error due to the input
command.
6.2.4.20 SET POINT
When LOC/RMT SP is set to LOCAL, this is the Local Set
Point Parameter that the system uses. It is only available
when REM SP is set to REMOTE.
6.2.4.21 SET POINT DEV ALRM
This is the percentage of the Process variable Signal by which
the Set Point and the Process Variable signal may differ
before an alarm is triggered.
6.2.4.22 LOC/RMT SP
This parameter configures whether the Process Variable set
point of the system is obtained locally (SP) when set to
LOCAL, or if it is obtained from the input signal (on input pair
number 3) when set to REMOTE.







































































