



























Networking
Network architecture:
In the micro-trooper, the embedded CPU
works as a gateway between the internal
wired LAN and the external wifi WLAN.
The CPU has at least one ethernet card and
one wireless card that form two separate
networks (LAN/WLAN).The LAN and the
WLAN should have in general a different
address class and therefore data needs to be
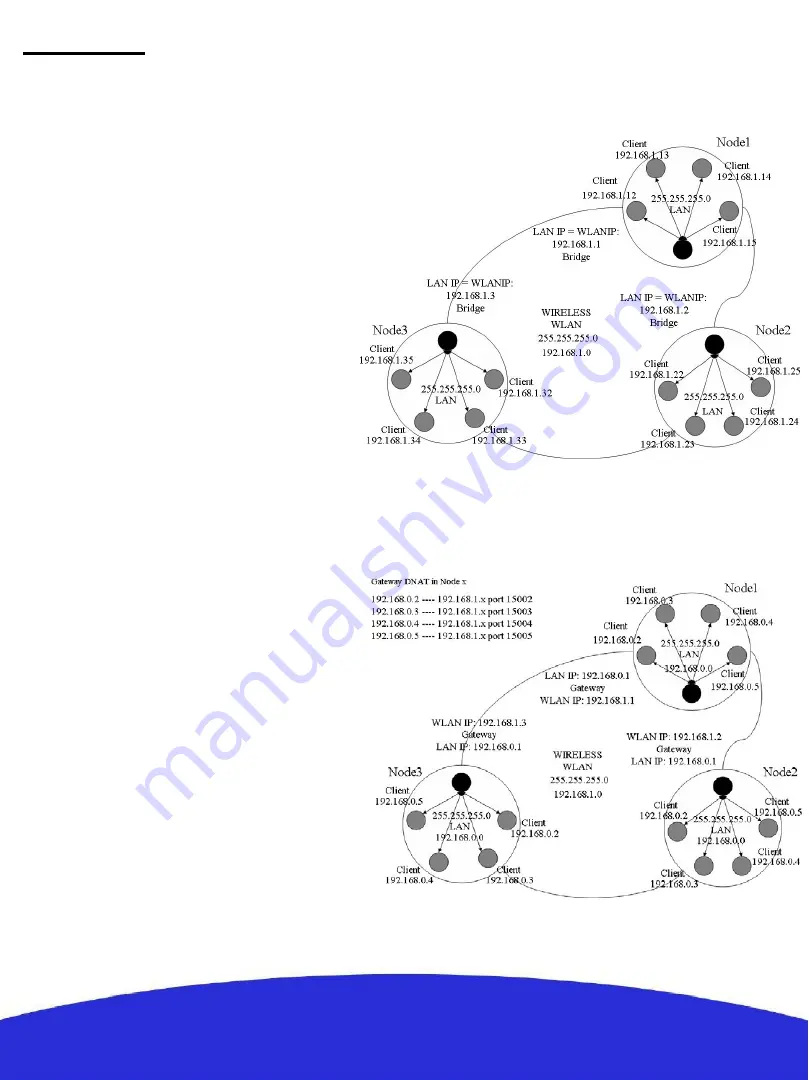
routed between them. Depending if you have
chosen a robot under Windows or Linux the
problem of connecting the two networks has
been solved differently. Under Windows this
has been done by configuring a bridge
between the network interfaces, by doing so
the robot’s CPU appears to have a unique
network interface and uses one single IP
address. Under Linux, the interconnection is
done through Dynamic NAT (Network
Address Translation) and the CPU uses two
different IP adresses, one for the internal
LAN and one for the WLAN. In both cases,
all local components of the robots such the
IP camera will have their own IP address
within the LAN, but when it comes to
accessing them from the WLAN the method
will differ. Under Windows as there is in
practice no distinction between the WLAN
and the LAN, every internal component will
be reached using its own IP address (see
Fig1
). Under Linux, only the robot’s CPU
WLAN IP address can be seen and any
internal network element will have to be
reached using this single IP. In order to be
able to access the separate devices using a
single IP, we will need to assign to each of
them a separate port (see
Fig2
). This will
require to configure the CPU with the proper
routing table (see pag 18).
Fig 1
Fig 2
15







































































