




















126
ATmega103(L)
0945G–09/01
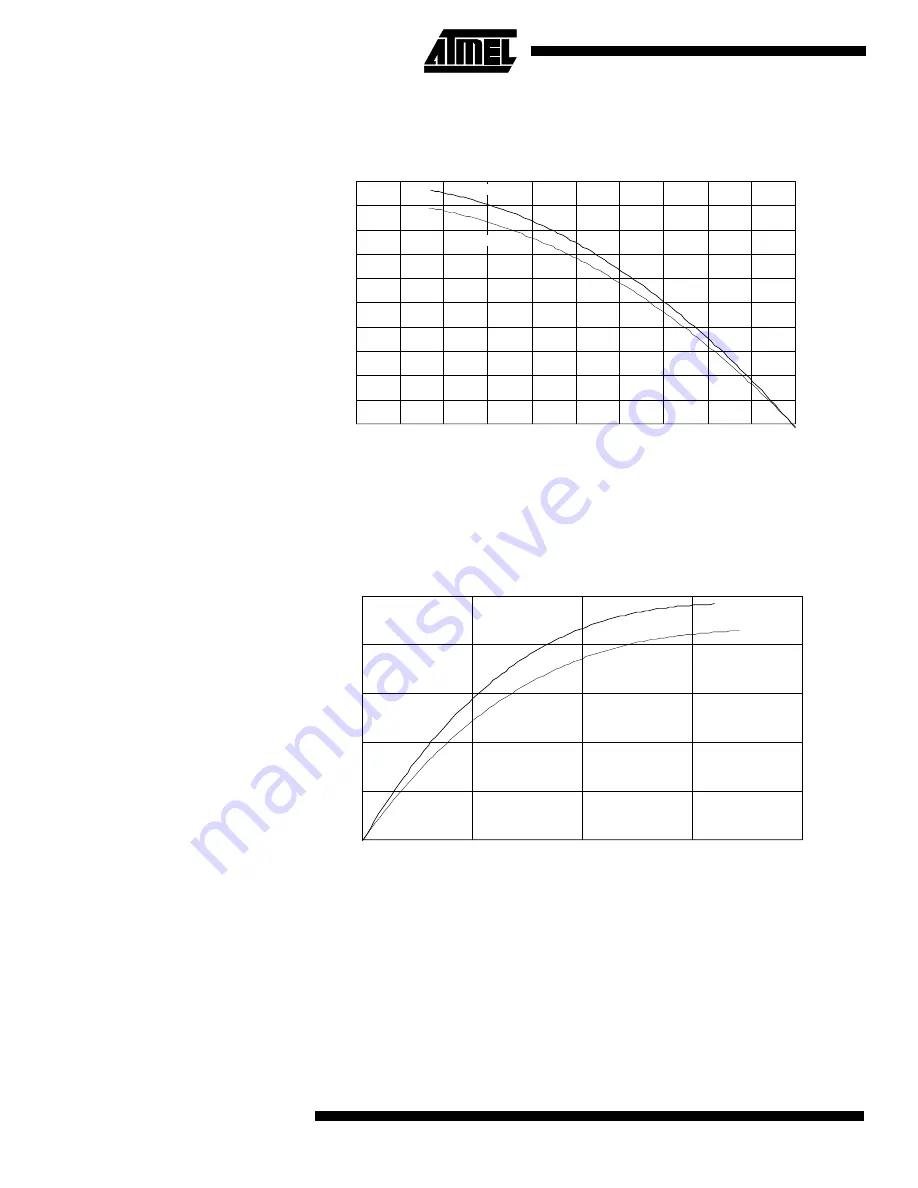
Figure 96.
I/O Pin Source Current vs. Output Voltage
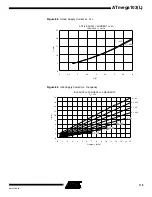
Figure 97.
I/O Pin Sink Current vs. Output Voltage
0
2
4
6
8
10
12
14
16
18
20
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
I/O PIN SOURCE CURRENT vs. OUTPUT VOLTAGE
V = 5V
cc
I
(mA)
OH
V (V)
OH
T = 85
˚
C
A
T = 25
˚
C
A
0
5
10
15
20
25
0
0.5
1
1.5
2
I
(mA)
OL
V (V)
OL
T = 85
˚
C
A
T = 25
˚
C
A
I/O PIN SINK CURRENT vs. OUTPUT VOLTAGE
V = 2.7V
cc







































































