





























Bits
Description
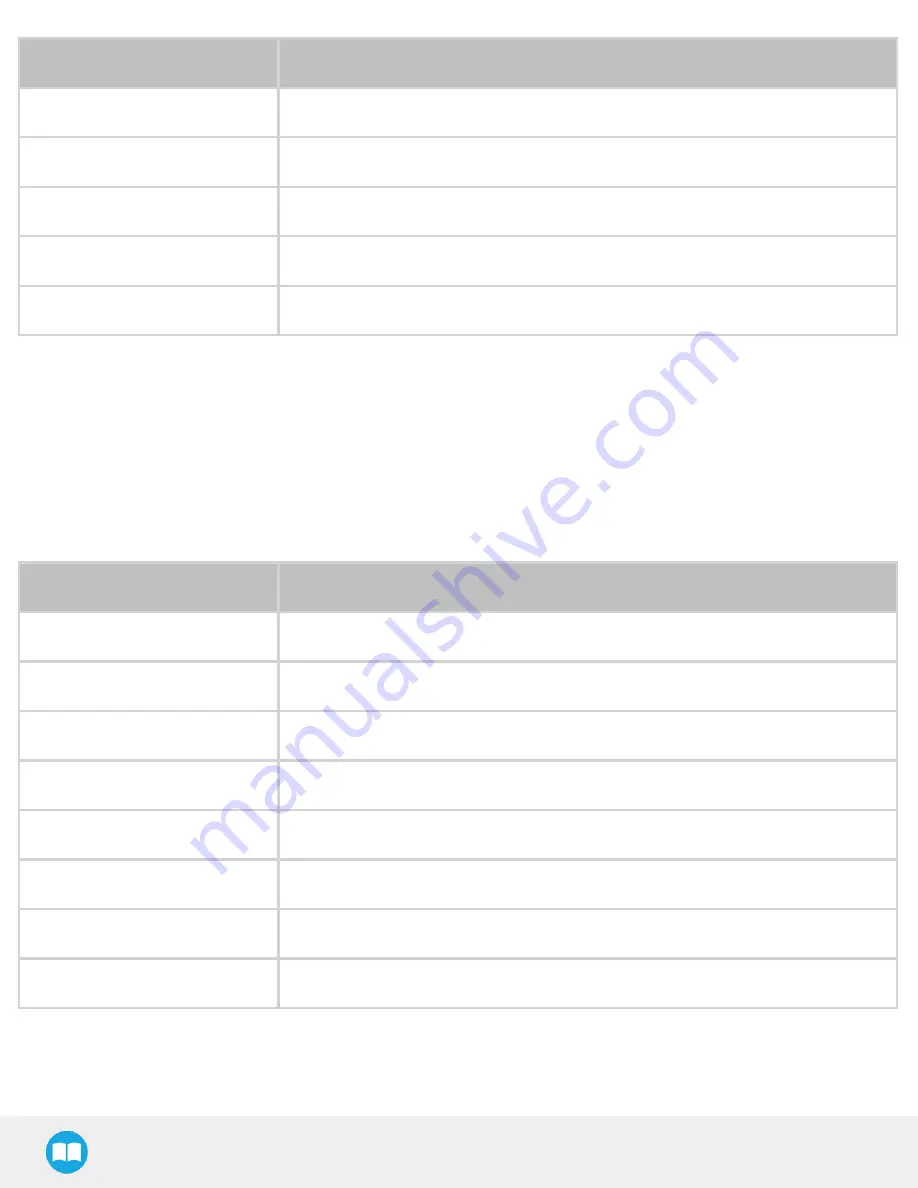
09
Slave ID
06
Function Code 06 (Preset Single Registers)
03E9
Address of the requested register
0019
Value written in register 03E9 (Maximum pressure level = 75%)
98F8
Cyclic Redundancy Check (CRC)
4.7.4. Preset multiple registers (FC16)
Function code 16 (FC16) is used to activate functionalities of the Vacuum Gripper (robot output). Examples of use of these data are
action request, maximum vacuum level, minimum vacuum level, etc.
Example of setting multiple registers FC16:
This message request sets the maximum relative pressure level, the grip timeout, and minimum relative pressure.
Request is: 09 10 03 E9 00 02 04 00 19 0A 23 95 A3
Bits
Description
09
Slave ID
10
Function Code 16 (Preset Multiple Registers)
03E9
Address of the first requested register
0002
Number of registers requested (2)
04
Number of data bytes to follow (2 registers x 2 bytes/register = 4 bytes)
0019
Value written in register 03E9 (Maximum pressure level = 75%)
0A23
Value written in register 03EA (Timeout of 1 second, minimum pressure level = 65%)
95A3
Cyclic Redundancy Check (CRC)
Response is: 09 10 03 E9 00 02 91 30
51
Summary of Contents for AirPick
Page 25: ...Fig 3 7 Mounting air nodes suction cups air bolts air nuts on the bracket 25...
Page 27: ...Fig 3 9 Robotiq Vacuum Gripper with pigtail cable and device cable wiring scheme 27...
Page 35: ...Fig 4 1 Vacuum Gripper control logic overview 35...
Page 57: ...7 Click on the New Project icon in the upper left corner of the screen 57...
Page 58: ...AirPick Instruction Manual 8 Enter a name for your program and click on the OK button 9 58...
Page 76: ...Fig 6 5 Minimum and maximum arrangement possibilities of the air nodes position 76...
Page 77: ...AirPick Instruction Manual 6 1 3 Air nodes Fig 6 6 Air nodes dimensions 77...
Page 103: ...AirPick Instruction Manual 12 Appendix Fig 12 1 Pneumatic schema of the AirPick Vacuum Gripper...







































































