





























Additional Software Options
56
RG2
RG6
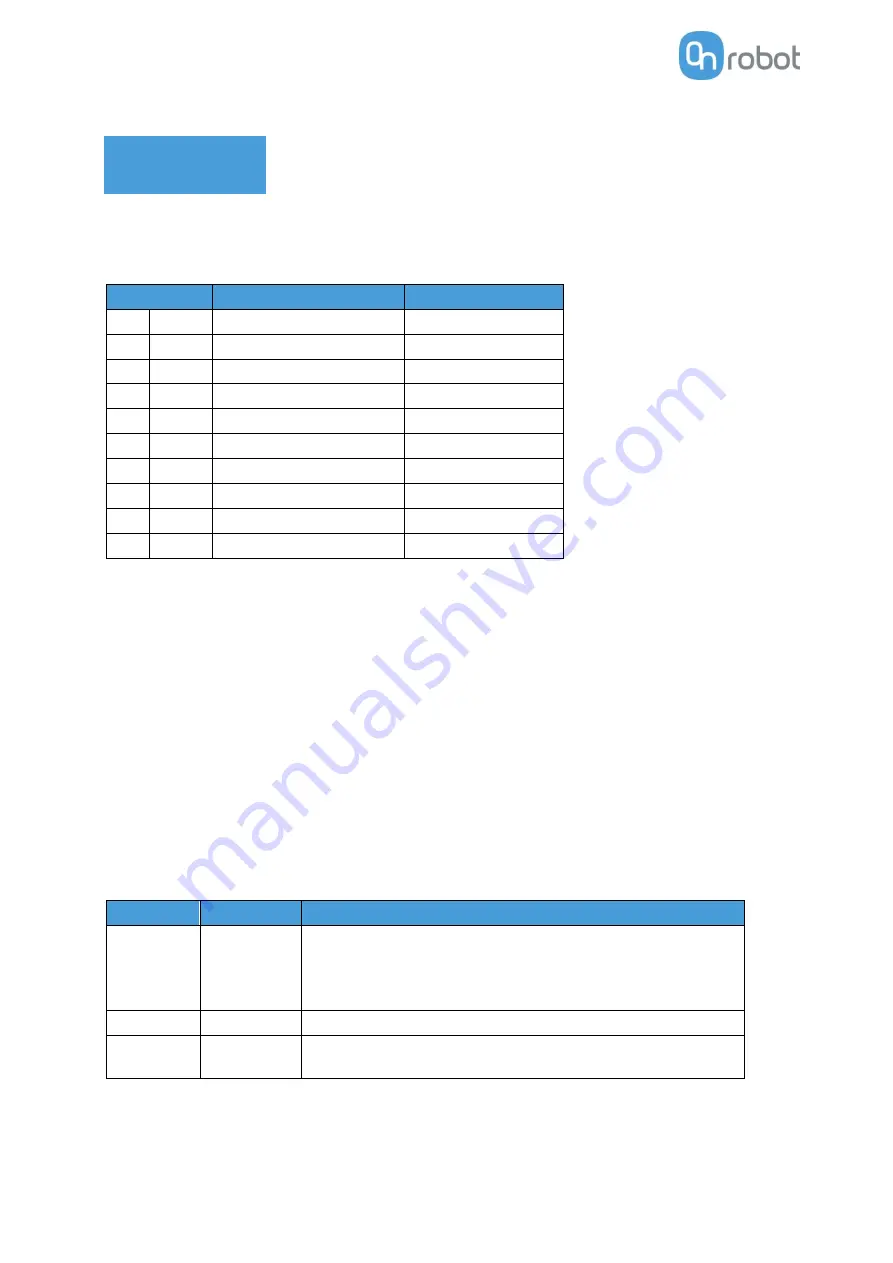
The table below provides an overview of the available MODBUS registers in the RG2/6.
All writable registers can be accessed using function codes 6, 16 or 23 and all readable registers can be
accessed using function codes 3 or 23.
Address
Register
Access
0
0x0000 Target force
Write
1
0x0001 Target width
Write
2
0x0002 Control
Write
258 0x0102 Fingertip offset
Read only
263 0x0107 Actual depth
Read only
264 0x0108 Actual relative depth
Read only
267 0x010B Actual width
Read only
268 0x010C Status
Read only
275 0x0113 Actual width with offset
Read only
1031 0x0407 Set Fingertip offset
Write only
0 (0x0000) Target force (Write)
This field sets the target force to be reached when gripping and holding a workpiece. It must be provided
in 1/10th Newtons. The valid range is 0 to 400 for the RG2 and 0 to 1200 for the RG6.
1 (0x0001) Target width (Write)
This field sets the target width between the finger to be moved to and maintained. It must be provided in
1/10th millimeters. The valid range is 0 to 1100 for the RG2 and 0 to 1600 for the RG6. Please note that
the target width should be provided corrected for any fingertip offset, as it is measured between the
insides of the aluminum fingers.
2 (0x0002) Control (Write)
The control field is used to start and stop gripper motion. Only one option should be set at a time. Please
note that the gripper will not start a new motion before the one currently being executed is done (see
busy flag in the Status field). The valid flags are:
Value
Name
Description
1 (0x0001)
grip
Start the motion, with the preset target force and width.
Width is calculated without the fingertip offset.
Please note that the gripper will ignore this command if the
busy flag is set in the status field.
8 (0x0008)
stop
Stop the current motion.
16 (0x0010) grip_w_offset
Same as grip, but width is calculated with the set fingertip
offset.
258 (0x0102) Fingertip offset (Read only)
Indicates the current fingertip offset in 1/10 millimeters. Please note that the value is a signed two’s
complement number.
Summary of Contents for DOOSAN Gecko Gripper
Page 1: ...USER MANUAL FOR DOOSAN ROBOTS ORIGINAL INSTRUCTION EN v1 02...
Page 79: ...Hardware Specification 79 RG2 Gripping Speed Graph RG2 Work Range...
Page 82: ...Hardware Specification 82 RG6 Gripping Speed Graph RG6 Work Range...
Page 93: ...Hardware Specification 93 RG2 FT All dimensions are in mm and inches...
Page 94: ...Hardware Specification 94 RG2 All dimensions are in mm and inches...
Page 95: ...Hardware Specification 95 RG6 All dimensions are in mm and inches...
Page 96: ...Hardware Specification 96 VG10 All dimensions are in mm and inches...
Page 97: ...Hardware Specification 97 All dimensions are in mm and inches...
Page 98: ...Hardware Specification 98 Quick Changer Tool side All dimensions are in mm and inches...
Page 104: ...Certifications 104 10 Certifications...
Page 105: ...Certifications 105...







































































