



















11
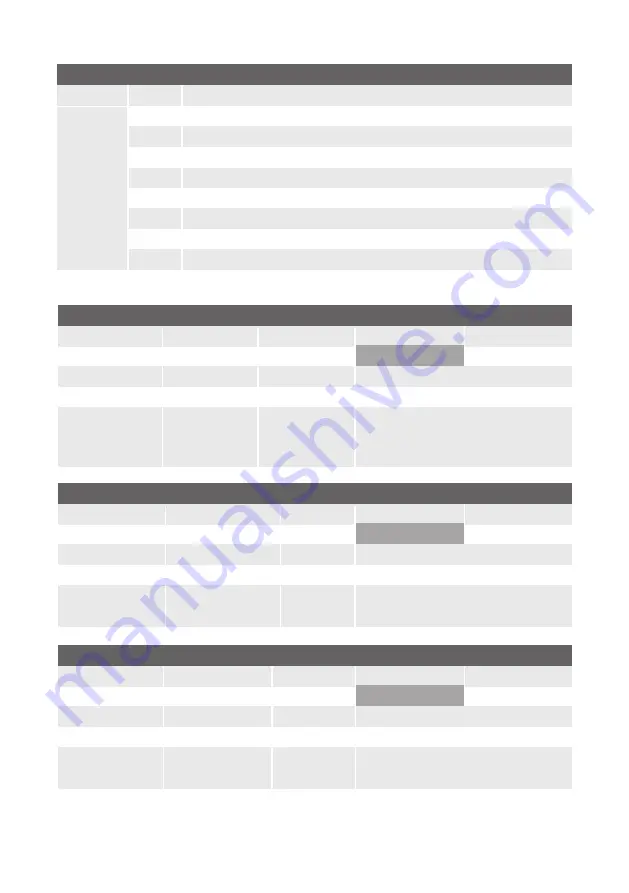
Parking control command is use to control the motor brake of the driving wheel. The detailed content of the protocol is as follows.
bit [0]
bit [1]
bit [2]
bit [3]
bit [4]
bit [5]
bit [6]
bit [7]
Whether the power supply voltage is too low (0:Normal 1:Too low)
Whether the motor is overheated (0:Normal 1:Overheated)
Whether the drive is over current (0:Normal 1:Over current)
Whether the drive is overheated (0:Normal 1:Overheated)
Sensor status (0:Normal 1:Abnormal)
Drive error status (0:Normal 1:Error)
Drive enable status (0:Normal 1:Disability)
Reserved
byte [5]
Byte
Bit
Description
Drive Status
Sending node
Decision-making control unit
Date length
Position
byte [0]
Receiving node
Chassis node
0×01
Function
Parking command
ID
0×131
Date type
unsigned int8
Description
0×00 Turn off parking (unlock the brake)
0×01 Turning on parking (lock the brake)
The brake need to be unlocked to
control the speed of the chassis
Command Name
Parking Control Command
Cycle (ms)
None
Receive-timeout (ms)
None
Sending node
Decision-making control unit
Date length
Position
byte [0]
Receiving node
Chassis node
0×01
Function
Setting current position to zero
ID
0x431
Date type
unsigned int8
Description
Setting current position to zero
Fixed value: 0×AA
Command Name
Steering Zero Setting Command
Cycle (ms)
None
Receive-timeout (ms)
None
Sending node
Decision-making control unit
Date length
Position
byte [0]
Receiving node
Chassis node
0×01
Function
Reply the steering zero setting
ID
0x43A
Date type
unsigned int8
Description
0×EE Setting current position to zero successfully
Command Name
Steering Zero Setting Feedback Command
Cycle (ms)
None
Receive-timeout (ms)
None






























































