














19
The SkyView Pro GoTo system will emit a “beep” sound and
display “Record completed” when the training time is up. Press
any button to exit from the PEC Training upon completion.
Play Back the PEC Record
PEC tracking can be activated under the Setup menu or by
pressing the Setup quick reference button when needed. In
the Setup menu, choose “Set Tracking”, then “PEC + Sidereal”.
The SkyView Pro GoTo system will play back the corrections
you made during the PEC training cycle and start tracking
with periodic error compensated.
Note: The SkyView Pro will continue to track in the PEC
+ sidereal mode until another tracking mode is selected.
If the power is turned off while the SkyView Pro is in the
PEC + sidereal mode, the hand controller loses synchro-
nization with the R.A. worm gear and the PEC training
will have to be repeated when the power is turned back
on. To avoid this, be sure to return the telescope to its
home position by selecting “Park Scope” under “Utility
Functions” before turning off the power.
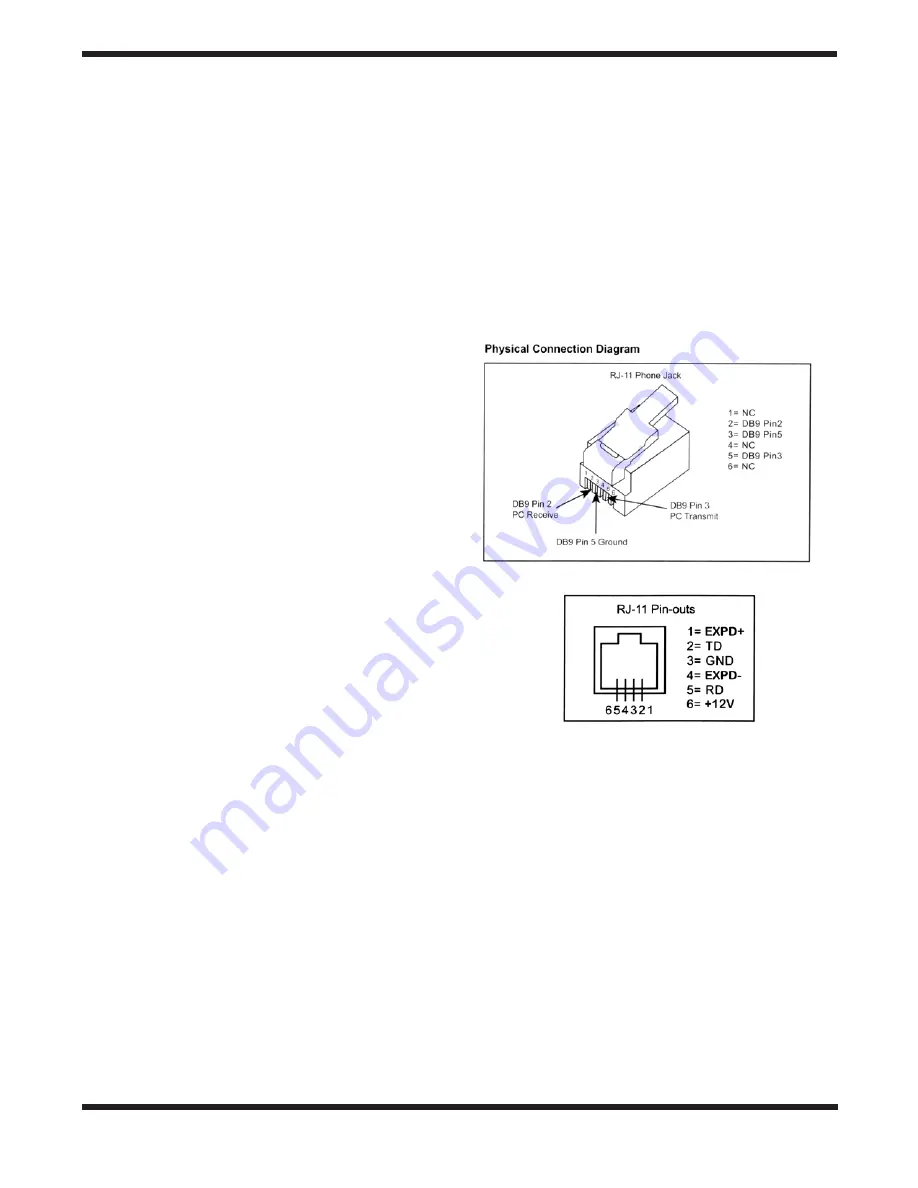
appendix c: rs‑232
connection
The SkyView Pro GoTo hand controller must be set to RS-232
mode in order to establish an interface connection with a PC.
Under the UTILITIES menu, select RS232 and press ENTER
to initiate the computer interface mode. The hand controller
will now communicate with the PC at a rate of 9600 bits/sec,
no parity and stop bit. All angles are communicated with 16
bit numbers.
Initialization
1. PC sends one byte ( 63 = ASCII “?”) to check wheteher
the hand controller is ready.
2. The hand controller responds with one byte (35 = ASCII
“#”) when the hand controller is ready to respond.
Note: All INITIALIZATION steps are recommended but not
necessary
GoTo R.A.-DEC positions
1. NITIALIZATION
2. PC sends (82 = ASCII “R”)
3. PC sends the R.A. high byte, R.A. low byte, DEC high
byte, DEC low byte.
4. When the scope is finished slewing, it will display a “@” on
the hand controller.
GoTo Alt-Az positions
1. INITIALIZATION
2. PC sends (65 = ASCII “A”)
3. PC sends the Azm high byte, Azm low byte, Alt high byte,
Alt low byte.
4. When the scope is finished slewing, it will display a “@” on
the hand controller.
Get R.A.-DEC positions
1. INITIALIZATION
2. PC sends (69 = ASCII “E”)
3. The hand controller sends the R.A. high byte, R.A. low
byte, DEC high byte, DEC low byte.
Get Alt-Az positions
1. INITIALIZATION
2. PC sends (90 = ASCII “Z”)
3. The hand controller sends the Azm high byte, Azm low
byte, Alt high byte, Alt low byte.





























































