




























3-Finger Adaptive Robot Gripper Instruction Manual
4. Control
Info
Unless specified, all values in Section 4 are hexadecimal values.
Info
Register format is Little Endian (Intel format), namely from LSB (Less Significant Bit) to MSB (Most Significant Bit). Meaning that bytes are
written with the least significant byte in the smallest address. If Big-endian would be writing from left to right, Little-endian would be writing from
right to left.
4.1 Overview
Caution
This section applies to firmware 3.0 (Grippers delivered after November 2011). For prior versions please see the documentation archives.
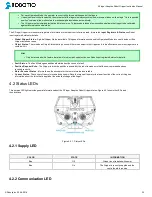
The Robotiq 3-Finger Adaptive Robot Gripper is controlled from the robot controller (see Figure 4.1.1) using an industrial protocol (EtherNet/IP,
DeviceNet, CANopen, EtherCat, etc.). The programming of the Gripper can be done with the Teach Pendant of the robot or by offline programming.
Since the Robotiq 3-Finger Gripper has its own internal controller, high-level commands such as "Go to requested position" are used to control it. The
embedded Robotiq controller takes care of the regulation of the speed and the force prescribed, while the mechanical design of the fingers
automatically adapts to the shape of object(s).
Figure 4.1.1 : 3-Finger Gripper connections.
The Gripper controller has an internal memory that is shared with the robot controller. One part of the memory is for the robot output,
gripper
functionalities
. The other part of the memory is for the robot input,
gripper status
. Two types of actions can then be done by the robot controller:
1.
Write in the
robot output
registers to activate
functionalities
;
2.
Read in the
robot input
registers to get the status of the Gripper.
To control the 3-Finger Adaptive Robot Gripper,
Output Registers & Functionnalities
must be written, the following is a summary of the various
registers, see Robot output registers & functionnalities for details:
l
Action Request
- Will command the Gripper to activate, switch operation mode, go to requested position or release its grip.
l
Gripper Options
- Contains optional modes of controls.
l
Position Request
- Sets the desired position of the grip (but does not activate movement).
l
Speed
- Sets the desired speed of the grip.
l
Force
- Sets the desired force of the grip.
Hint
©Robotiq inc. 2008-2018
31







































































