


























CDE360 Vector Control AC Drive Chapter 6 Parameters Description
E7.06
Range: 1~
E7.05
Default: 1000
Designated
count value
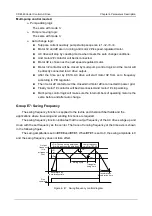
When the counting value reaches E7.06 (the designated counting value),
the Y terminal allocated with function 21 (Designated count value
reached) becomes ON. Then the counter continues to count until the set
count value is reached.
E7.06 should be equal to or smaller than E7.05.
Example:
E7.05(Set count value)= 7, E7.06(Designated count value)= 3, C0.01(X1function)=
42(Counter input), C0.02(X2 function)= 43(Counter reset), C1.01(Y1function)= 21(Designated
count value reached), C1.02(Y2 function)= 20(Set count value reached).
So,Y1 will become ON when the third pulse inputs X1.Y2 will become ON when the
seventh pulse inputs X1.Y1 and Y2 will return to OFF status when X2 becomes effective.
1 2
3
X1(Count
pulses input)
Y1(Designated
count value
reached output)
Y2(Set count value
reached output)
X2(Counter reset)
7
1
A0.25 = 3
A0.25 = 7
Figure 6- 48 Reaching the set count value and designated count value diagram
E7.07
Range: 0~65535
Default: 1000
Set length
Unit: m
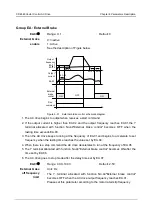
Allocate corresponding X terminal with function 44 (Length count input) in
applications. If the pulse frequency is high, X6/FI must be used.
The length information is collected by X terminals.
A0.26
(Actual length) is
calculated by dividing the number of pulses(collected from the X terminal)
by
E7.08
(Number of pulses each meter).
When the actual length
A0.26
exceeds the set length in
E7.07
, the Y
terminal allocated with function 22 (Length reached) becomes ON.
During the fixed length control, the length reset operation can be
performed via the X terminal allocated with function 45(Length reset).
E7.08
Range: 0.1~6553.5
Default: 100.0
Number of
Pulses per
meter
See the parameter description of
E7.07
.







































































