





























CAM Control
DOC_MAN_MEC_EFAS-CAM_#SEN_#AIN_#V1
Seite 21 von 56
Version: 2018 / 02
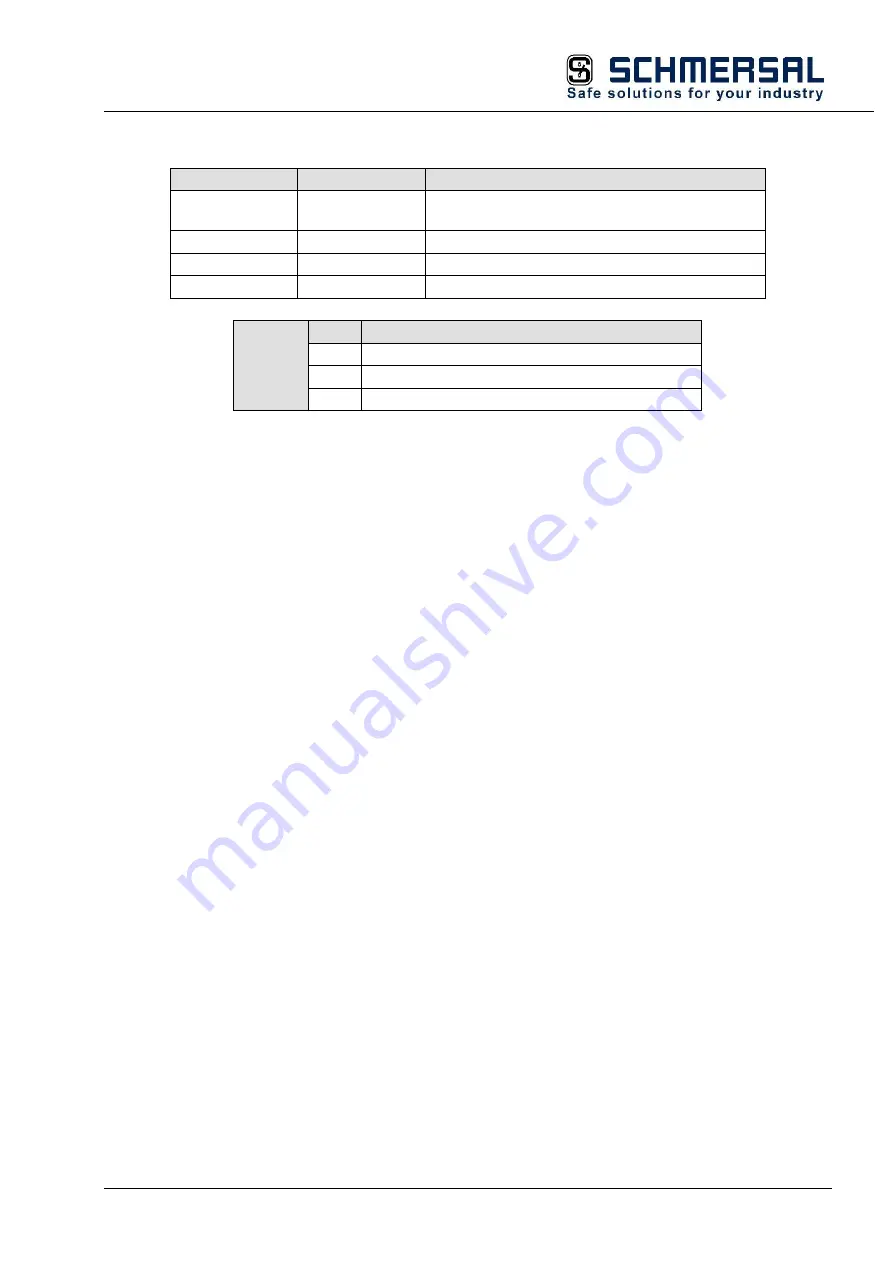
4.1.3.2 Output variables
Variable
Data type
Explanation
Control1
USINT
Selects the cam program
(currently not implemented.)
Control2
USINT
Control bits
PositionSet
UINT
Sets the position in slave mode
SpeedSet
UINT
Sets the velocity in slave mode
Control2
Bit no. Explanation if TRUE
0
Reset Error (if 1)
1
Reference the position (0->1)
2..7
Not used
4.1.3.3 Position referencing
An ON signal received by Ref input DI0.7 resets the counter reading to "0". This is referencing the position (if
an incremental encoder is used).
State 1 Bit 1 indicates the state of referencing.
4.1.3.4 Cam tracks
Cam tracks 0 .. 24 directly actuate digital outputs 0.0 to 2.7.
Cam tracks 25 .. 32 are software cams which the EtherCAT master, CAN master or other unit can read and
output to other modules equipped with digital outputs (extension).
4.1.3.5 Slave mode
Only one encoder is required to run several CAM modules in a synchronised manner. The module that the
encoder is connected to can use EtherCAT to transfer the position and velocity to the other modules.







































































