





























AZ3s USER MANUAL
ST.TEC.054
42 / 60
5.2.
Profile position mode
In profile position mode the drive control the position of the shaft.
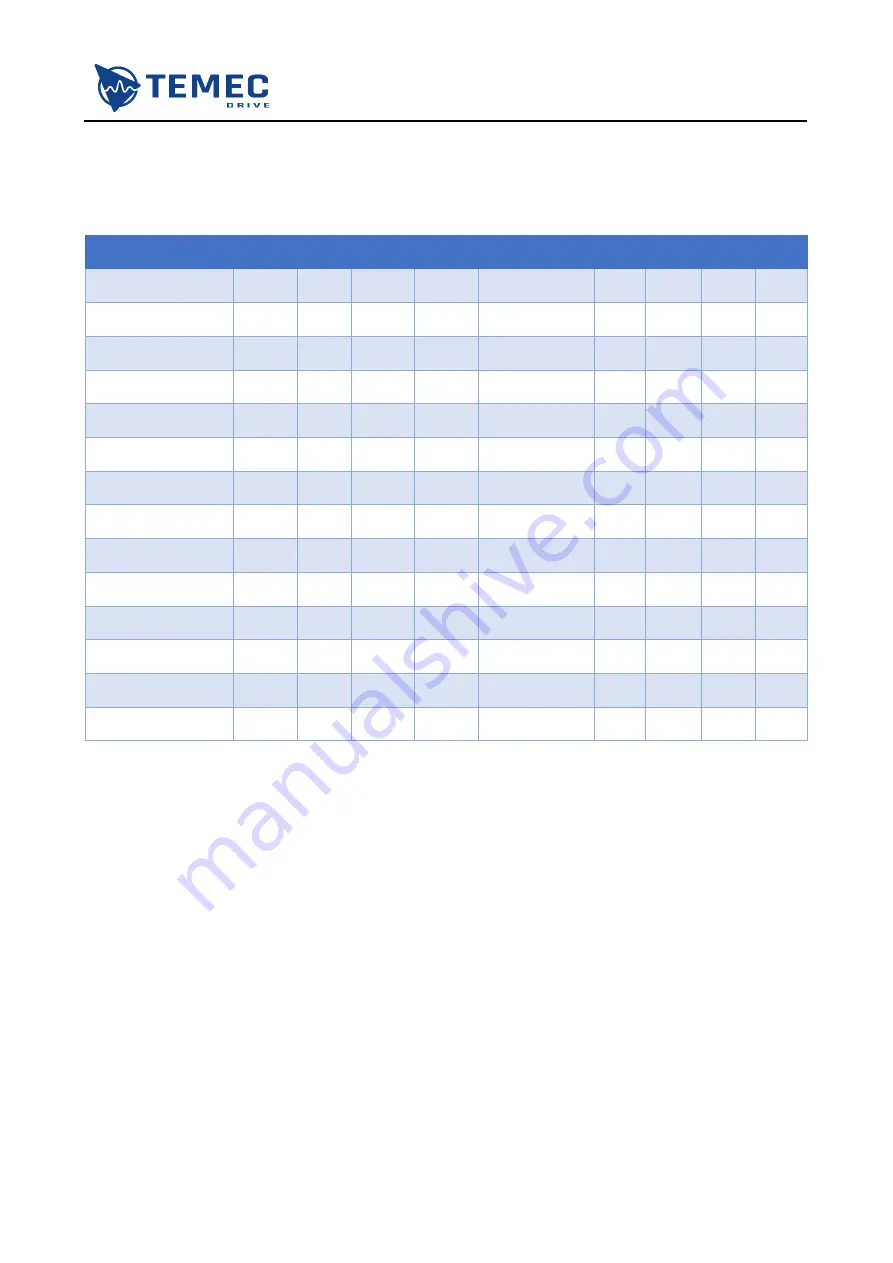
5.2.1.
P
ARAMETERS
Variable
Type
Code
Unit
Default
Range
Can open
address
Modbus logical
address
Control word
UNS16
CM1
-
0
0÷65535
INDEX
SUB
6040h
00h
HR
156
Modes of operation*
S8
CM2
-
3
-128÷127
INDEX
SUB
6060h
00h
HR
157L
Target position
S32
PC1
-
0
-1.0E18÷1.0E18
INDEX
SUB
607Ah
00h
HR
279
280
Profile acceleration
UNS32
SF2
-
1000
0÷2.0E6
INDEX
SUB
6083h
00h
HR
87
88
Profile deceleration
UNS32
PRF1
-
1000
0÷2.0E6
INDEX
SUB
6084h
00h
HR
40
41
Invert Position
feedback
COIL
DF5
-
0
-
INDEX
SUB
2018h
(bit 4)
COIL
5
Reset Position
COIL
DF12
-
0
-
INDEX
SUB
2018h
(bit 11)
COIL
12
Min position range
limit
S32
PC2
-
-100000
-1.0E18÷1.0E18
INDEX
SUB
607Bh
02h
HR
281
282
Max position range
limit
S32
PC3
-
100000
-1.0E18÷1.0E18
INDEX
SUB
607Bh
01h
HR
283
284
Soft min position limit
S32
PC4
-
0
-1.0E18÷1.0E18
INDEX
SUB
607Dh
01h
HR
285
286
Soft max position limit
S32
PC5
-
0
-1.0E18÷1.0E18
INDEX
SUB
607Dh
02h
HR
287
288
Max profile velocity
UNS32
PC6
-
3000
0÷2.0E6
INDEX
SUB
607Fh
00h
HR
289
290
Profile velocity
UNS32
PC7
-
1000
0÷2.0E6
INDEX
SUB
6081h
00h
HR
291
292
Position actual value
S32
MV5
-
0
-2 E9÷2.0E9
INDEX
SUB
6064h
00h
IR
121
122
*
This parameter once changed, will become operational only when power stage is disabled.
5.2.2.
C
ONFIGURATIONS
To control the shaft position through AZ3s, mode of operations must be set to 1 as defined in DS402
specification.
Target position is the position set point and can be modified through CAN or Modbus, analog inputs
(refer to chapter 4.4) and digital inputs (refer to chapter 4.5).
Soft min position limit and Soft max position limit define the absolute position limits for the Target
position and the Position actual value. If the shaft moves over these limits power stage is disabled.
Min position range limit and Max position range limit shall limit the numerical range of Target
position. This parameters are summarized in the position ramp block in the image below.
Position actual value is the feedback of the actual position. Setting Invert position feedback to 1, it
is possible to invert the value read in Position actual value.
Profile acceleration, Profile deceleration and Max profile velocity have the same functions that in
Profile velocity mode. Profile velocity defines the operating speed used in order to reach Target
position.







































































