





























User Manual of iSV2-CAN Servo
www.leadshine.com
50
If 6092h_01(Feed constant) is not equal to 608Fh(Position encoder resolution), then:
Electronic gear ratio = Encoder resolution / 6092h_01
If 6092h_01(Feed constant) is equal to 608Fh(Position encoder resolution), then:
Electronic gear ratio = 6091_01 / 6092h_01
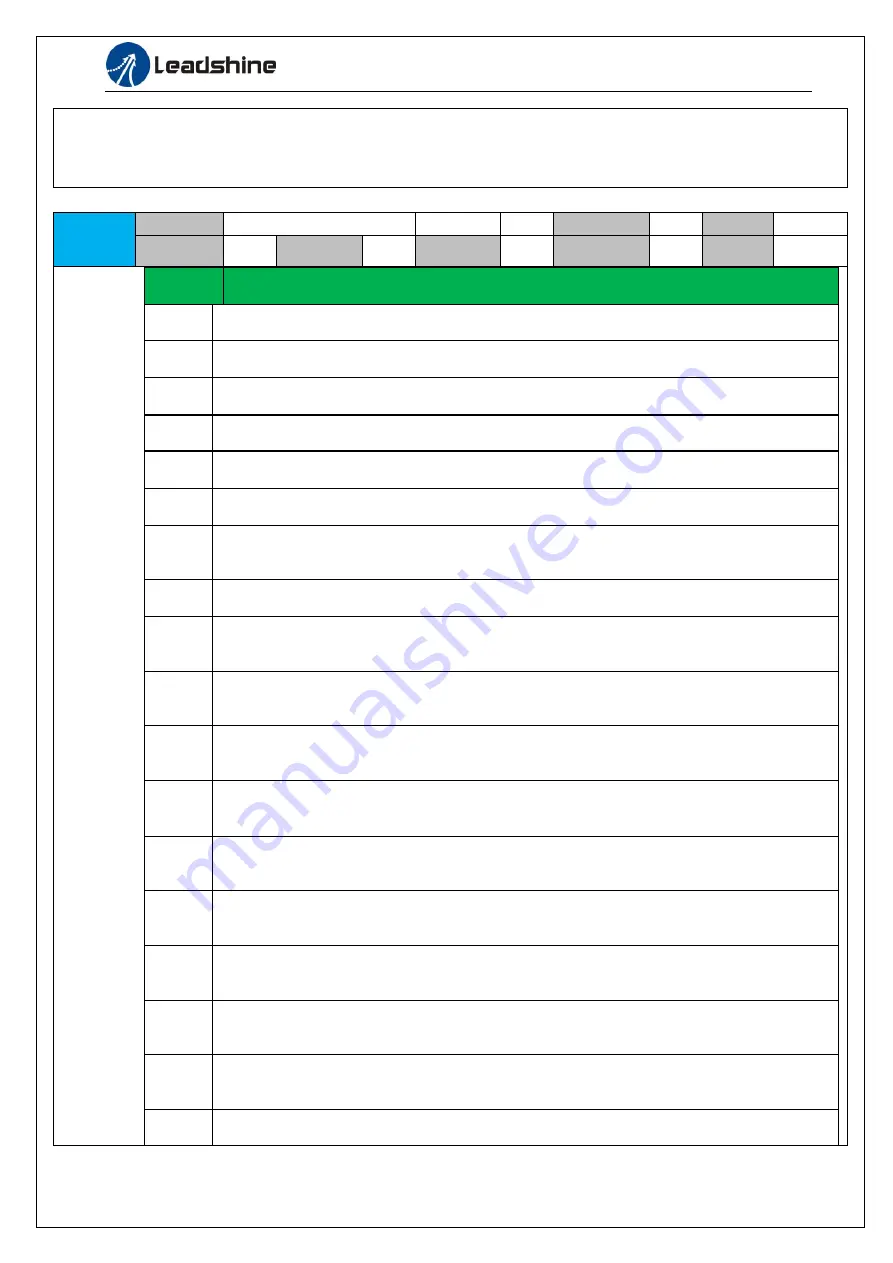
Index
6098H
Name
Homing Method
Structure
VAR
Type
Uint 8
Access
RW
Mapping
RPDO
Mode
ALL
Range
0-35
Default
0
Homing
Method
Description
-6
Search the homing point with low speed negative direction, when the torque reached then stop
immediately
-5
Search the homing point with low speed positive direction, when the torque reached then stop
immediately
-4
Search the homing point with low speed negative direction, when the torque reached then
change the motion direction, when the torque is gone then stop immediately
-3
Search the homing point with low speed positive direction, when the torque reached then
change the motion direction, when the torque is gone then stop immediately
-2
Search the homing point with low speed negative direction, when the torque reached then
reverse the direction, when the torque is gone and Z signal coming then stop immediately
-1
Search the homing point with low speed positive direction, when the torque reached then
reverse the direction, when the torque is gone and Z signal coming then stop immediately
1
Search the homing point in negative direction, deceleration point is negative limit switch,
homing point is motor Z signal, the negative limit switch falling edge must come before Z
signal
2
Search the homing point in positive direction, deceleration point is positive limit switch, homing
point is motor Z signal, the positive limit switch falling edge must come before Z signal
3
Search the homing point in positive direction, deceleration point is homing switch, homing
point is motor Z signal, the falling edge on the same side of homing switch must come before Z
signal
4
Search the homing point in negative direction, deceleration point is homing switch, homing
point is motor Z signal, the rising edge on the same side of homing switch must come before Z
signal
5
Search the homing point in negative direction, deceleration point is homing switch, homing
point is motor Z signal, the falling edge on the same side of homing switch must come before Z
signal
6
Search the homing point in positive direction, deceleration point is homing switch, homing
point is motor Z signal, the rising edge on the same side of homing switch must come before Z
signal
7
Search the homing point in positive direction, deceleration point is homing switch, homing
point is motor Z signal, the falling edge on the same side of homing switch must come before Z
signal
8
Search the homing point in positive direction, deceleration point is homing switch, homing
point is motor Z signal, the rising edge on the same side of homing switch must come before Z
signal
9
Search the homing point in positive direction, deceleration point is homing switch, homing
point is motor Z signal, the rising edge on the other side of homing switch must come before Z
signal
10
Search the homing point in positive direction, deceleration point is homing switch, homing
point is motor Z signal, the falling edge on the other side of homing switch must come before Z
signal
11
Search the homing point in negative direction, deceleration point is homing switch, homing
point is motor Z signal, the falling edge on the same side of homing switch must come before Z
signal
12
Search the homing point in negative direction, deceleration point is homing switch, homing
point is motor Z signal, the rising edge on the same side of homing switch must come before Z







































































