





























User Manual of iSV2-CAN Servo
www.leadshine.com
67
immediately
set-point
0
0 1
Actual positioning will be completed (target reached) before the next one
gets started (Set of set-points mode)
1
0 1
Next positioning shall be started immediately interrupting the actual one.
Next table defines the values for bit 6 and 8 of the controlword.
Name
Value
Description
Abs / rel
0
Target position is an absolute value.
1
Target position is a relative value.
Halt
0
Execute positioning.
1
Stop axis with profile deceleration(6084h).
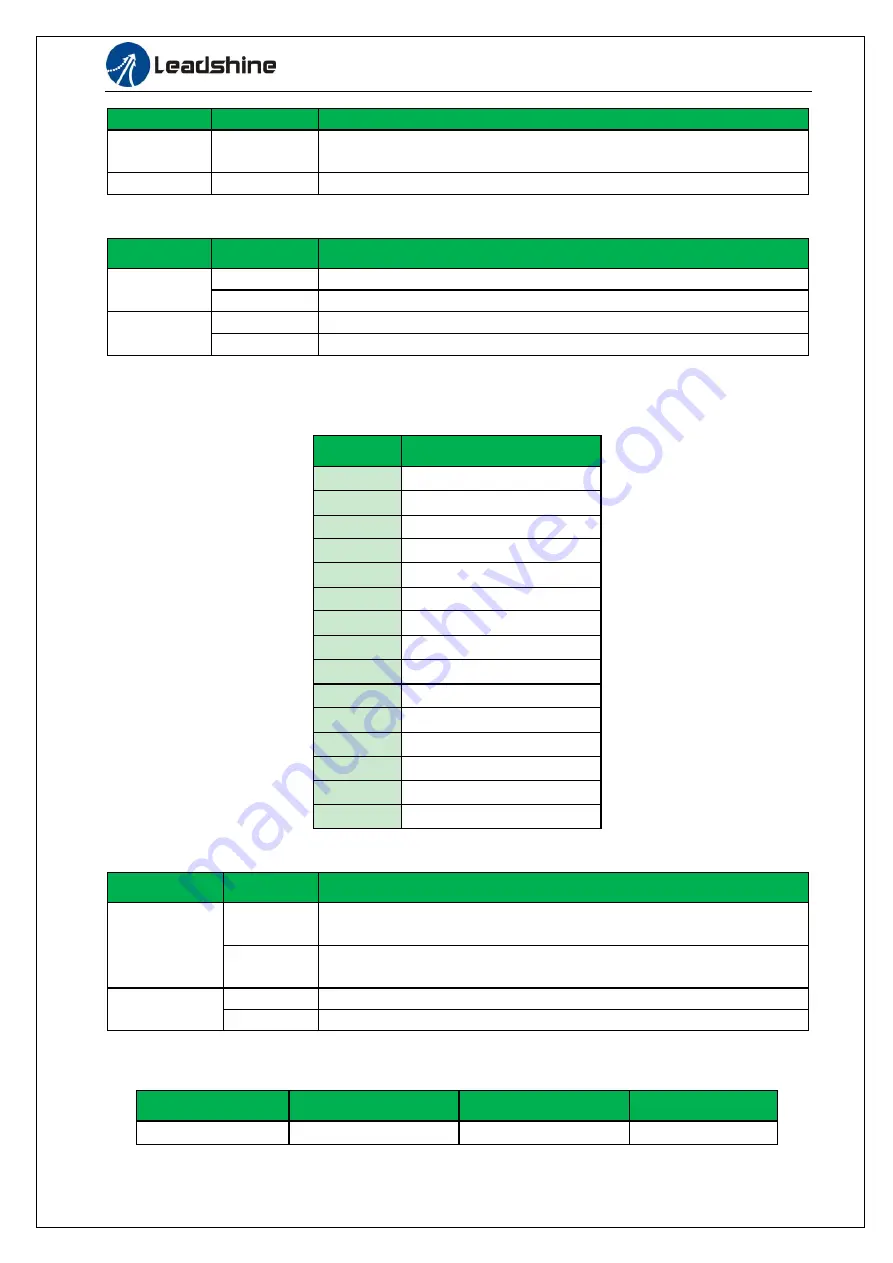
6.5.2 Statusword in profile position mode
The binary representation of the statusword(6041) in profile position mode is as follows:
Bit
Definition
15~14
Reserved
13
Following error
12
-
11
Position limit active
10
Target reached
9
Remote
8
Abnormal stop
7
Reserved
6
Switch on disabled
5
Quick stop
4
Voltage output
3
Fault
2
Operation enable
1
Switch on
0
Ready to switch on
The meaning of each bit is described below, depending on its value:
Name
Value
Description
Target reached
0
Halt=0: Target position not reached
Halt=1: Axis decelerates
1
Halt=0: Target position reached
Halt=1: Axis has velocity 0
Following error
0
No following error
0
Following error
6.5.3 Related objects
Object Dictionary
Description
Setup value
Units
6060H
Mode of operation
1







































































