


























PathMaster® Manual Rev. H 6/03
- 69 -
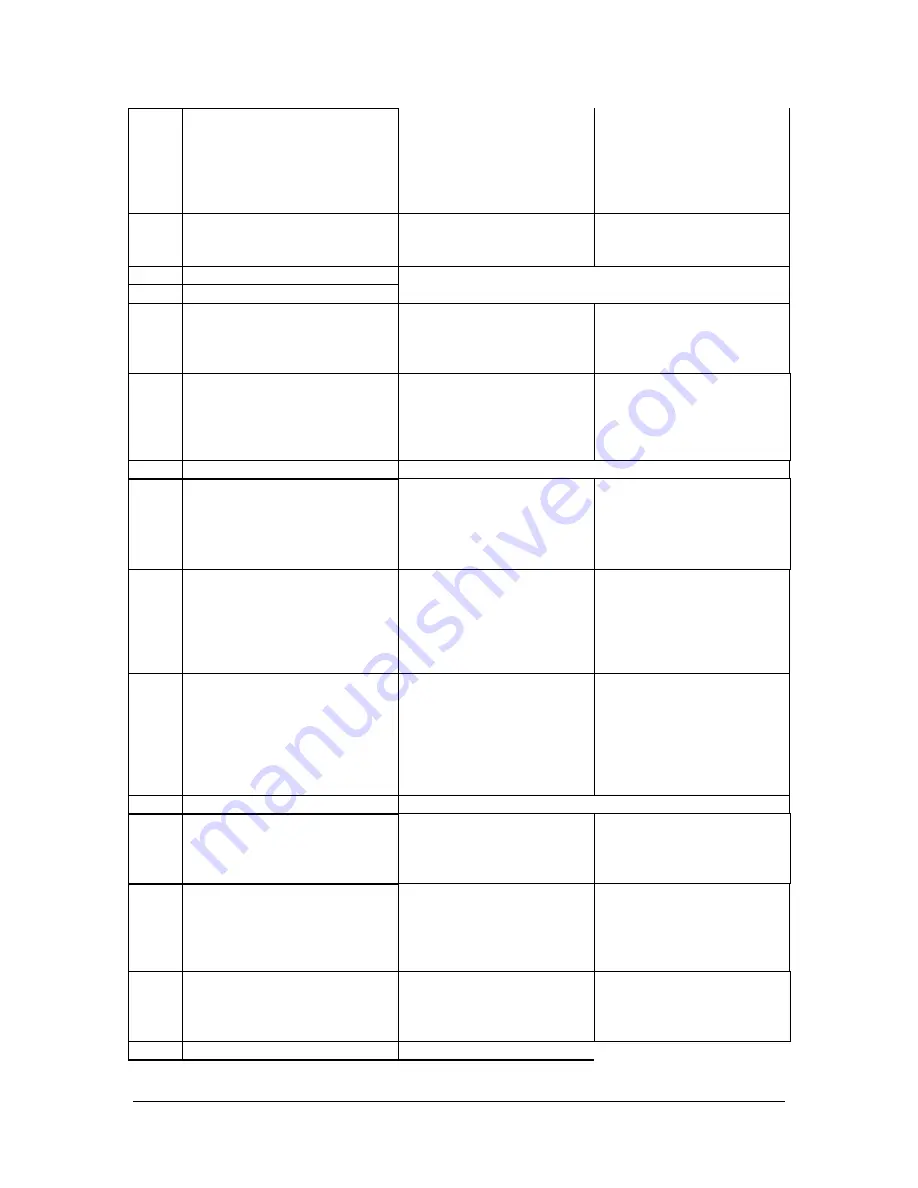
buffer is full.
MO
Motor off. Shuts off motor control. MO (turn all motors off), MOX
(turn off only the X axis
motor).
MO shuts off the motor(s).The
motors are reactivated with the
SH (servo here) command.
MR
Reverse Motion to Position
MT Motor
Type
NO
No operation. This command
performs no action and is used to
comment a program.
NO!!! PROGRAM 1!!!!
(description for program).
A semicolon (;) terminates the
NO command. Any statements
following a semicolon are
executed.
PA
Position absolute. This sets the
destination of a move, referenced
to the origin. The units are in
counts.
PA 10000,10000,1000
(commanded position for X, Y
and Z axes), PAX=10000
(commanded position of X
axis).
It is best to limit the use of the
PA command to designating
the start of a dispense path.
Overuse of the PA command
complicates program editing.
PF Position
Format
PR
Position relative. This sets the
incremental position of the next
move, referenced to the current
position. The units are in counts.
PR 10000,10000,1000
(commanded change in
position for X, Y and Z axes),
PRX=10000 (commanded
change in position of X axis).
Be careful not to confuse PA
with PR. The PR command
begins its move from the
current position, without
reference to the origin.
RS
Reset. Resets the controller to its
power on state. All the information
in the controller’s RAM is erased.
RS
If PathMaster™ fails to
download a file properly, the
program may be halted in the
controller. Executing an RS
command from the terminal
screen restarts the program.
SB
Set bit. Sets a bit on the output
port.
SB40 (sets the bit for the
buzzer).
Setting a bit in DMC
terminology turns the bit off.
The opposite of SB is CB
(clear bit).A complete list of
the outputs can be found in the
Machine Specific Information
section of the Operating Guide.
SC Stop
Code
SH
Servo here. The controller uses the
current position as the command
position and enables motor
control.
SH (activate all motors), SHZ
(activate only the Z motor).
The opposite of SH is MO
(motor off).SH resets all
position errors to zero.
SP
Speed. Sets the speed for
independent moves. Units are in
counts per second.
SP*=100000 (sets all axes),
SPX=100000 (only sets the X
axis speed), SP
10000,30000,40000 (sets X, Y
and Z speeds separately).
Make sure the value of the
acceleration is high enough to
get the motion to speed within
a reasonable amount of time.
ST
Stop. Halts motion on the
specified axes. If no axes are
specified, it halts program
execution.
STX (stop motion on the X
axis), ST (stop all motion and
halt the program).
Use the AM command after the
ST command to wait for
motion to be stopped.
TB
Summary of Contents for PVA2000
Page 9: ...Notes ...







































































