





























-
81
-
-
80
-
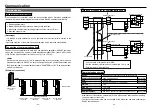
Communication timing
T3
0 to 2 ms
T1 or above
T1 or above
T2
T3
0 to 2 ms
T3
0 to 2 ms
Data transfer
EOT
ACK/NAK
Request
for sending
T3
0 to 2 ms
Amplifier
bus occupied
Host
→
Amplifier
Amplifier
→
Host
Symbol
Name
Value
T1
Communication response time (Amplifier)
Set by Pr63.
T2
Communication response time (Host)
Take interval 10 ms or longer.
T3
Data emitting time from amplifier to host after bus is occupied 0 to 2 ms
<Information>
(1) Time is counted from the rising edge of stop bit.
(2) Time allowed from receiving one character code until receiving the next character
code can be set by Pr65 “Protocol timeout”. If the next normal character code
cannot be received within the time set by this parameter, the amplifier detects
communication timeout and received data is canceled. If communication timeout is
detected continuously, and the number of detections exceeds the number of retrials
(Pr64), the amplifier trips because of RS485 communication error.
(3) When the host sends data and still does not receive any response from the
amplifier, communication error may be present through effect of noise, etc. In this
case, the host should send data again after time set by Pr65 “Protocol timeout”.
<Communication establishing time when power is turned on>
Establishment communication takes about 800 ms when the amplifier is powered on. The
amplifier does not make response in the meantime, therefore allow waiting time longer than
a second.
[Timing in power-on]
Communication
established 800 ms
Waiting time
longer than 1 second
Request for sending
Power ON
Response
Amplifier power supply
Host
→
Amplifier
Amplifier
→
Host
Communication
Communication command
Data number
Applicable command on host side
Description
8000h to 807Fh
$P/$S/$R
Parameter
8103h
$R
Amplifier status
8104h
$R
Model code 1
8105h
$R
Model code 2
8110h
$R
Rotation speed (actual speed)
8111h
$R
Commanded speed
8112h
$R
Internal DC voltage
8113h
$R
Torque
8114h
$R
Load factor
8115h
$R
Present position (rotation number)
8116h
$R
Present position (pulse)
8117h
$R
Target position (rotation number)
8118h
$R
Target position (pulse)
8120h
$R
Detail of trip
8130h
$R
Input terminal status
8131h
$R
Output terminal status
8180h
$P/$S
Run command
8190h
$P/$S
Trip reset
8191h
$P/$S
Forced trip
81B0h
$P/$S
Parameter EEPROM writing
Communication command in detail
8000h to 807Fh: Parameter
• $P: Parameter writing command (Without EEPROM writing function)
Received data (Host
→
Motor)
SOH
STX $
P
8
0
P1 P2 P3 P4 ETX BCC
Amplifier ID Host ID
Command
Parameter address
Parameter value
•
When the device number set on the amplifier (value of Pr60) matches with the
amplifier ID of received data, parameter change is executed.
•
When parameter address and parameter value are abnormal, NAK is answered.
•
Set the parameter address at ‘80
□□
’. (‘8062’ for Pr62)
•
Set the parameter value in 4 digits of ASCII code (P1, P2, P3, and P4) which is
obtained by conversion from the data to hexadecimal.
(e.g. 100 = ‘0064’, –100 = ‘FF9C’)
•
NAK is answered while the amplifier detects undervoltage error, and the parameter is
not changed.
•
Changed parameter is not written to EEPROM by this command. In order to make
changed parameter still effective after power resetting, execute EEPROM writing
command by data number 81B0h.
•
When run command is executed by I/O while parameter is being written by
communication at the same time, enter the run command after receiving ACK
response from the amplifier. The amplifier runs per the written parameter.







































































