



























-
39
-
-
38
-
Parameter
Overview of parameter
Brushless amplifier of this series has various parameters that are used for adjusting or set-
ting the features or functions of the motor. This section describes the purpose and function
of these parameters. Ensure a full understanding of the parameters to achieve optimum
operating performance.
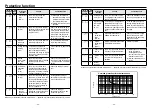
List of parameters
Parameter
No.
(Pr
□□
)
Name of parameter
Effective
after
power
resetting
Setting
range
Default
Description
00
The 1st point
The 1st target
position
(rotation number)
–16384 to
16383
0
Setting unit
[rotation
number]
You can set travel distance in
rotation numbers and pulses.
(288 pulses per rotation)
01
The 1st target
position (Pulse)
–288 to
288
0
Setting unit
[pulse]
02
The 1st
coordinate setting
0,1
1
You can select positioning system to the 1st point.
0: Relative travel, 1: Absolute travel
03
The 1st
setting speed
0 to 4000 2000 You can set the speed moving to the 1st
point. Setting unit [r/min]
04
The 1st
acceleration time
1 to 30000 200 You can set time taken for reaching the 1st
setting speed. Setting unit [ms]
05
The 1st
deceleration time
1 to 30000 200 You can set time taken from the 1st setting
speed to stop. Setting unit [ms]
06
The 1st block
setting
0 to 2
0
0: Normal operation
1: Continuous block operation
(1st point
→
2nd point )
2: Combined block operation
(1st point + 2nd point )
07
The 1st block
timer setting
0 to 30000 0
Enabled when you set Pr06 to “1”.
Start commanding of 2nd point after this set-
ting time elapses and command of 1st point
is completed. Enabled in unit of 2 ms. (If you
set to 1, this is rounded down and recog-
nized as 0.) Setting unit [ms]
08
The 2nd point
The 2nd target
position
(rotation number)
–16384 to
16383
0
Setting unit
[rotation
number]
You can set travel distance in
rotation numbers and pulses.
(288 pulses per rotation)
09
The 2nd target
position (Pulse)
–288 to
288
0
Setting unit
[pulse]
0A
The 2nd
coordinate setting
0,1
1
You can select positioning system to the 2nd point.
0: Relative travel, 1: Absolute travel
0b
The 2nd
setting speed
0 to 4000 2000 You can set the speed moving to the 2nd
point. Setting unit [r/min]
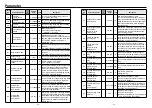
Parameter
No.
(Pr
□□
)
Name of parameter
Effective
after
power
resetting
Setting
range
Default
Description
0C
The 2nd point
The 2nd
acceleration time
1 to 30000 200 You can set time taken for reaching the 2nd
setting speed. Setting unit [ms]
0d
The 2nd
deceleration time
1 to 30000 200 You can set time taken from the 2nd setting
speed to stop. Setting unit [ms]
0E
The 2nd block
setting
0, 1
0
0: Normal operation
1: Continuous block operation
(2nd point
→
3rd point )
0F
The 2nd block
timer setting
0 to 30000 0
Enabled when you set Pr0E to “1”.
Start commanding of 3rd point after this set-
ting time elapses and command of 2nd point
is completed. Enabled in unit of 2 ms.
Setting unit [ms]
10
The 3rd point
The 3rd target
position
(rotation number)
–16384 to
16383
0
Setting unit
[rotation
number]
You can set travel distance in
rotation numbers and pulses.
(288 pulses per rotation)
11
The 3rd target
position (Pulse)
–288 to
288
0
Setting unit
[pulse]
12
The 3rd
coordinate setting
0, 1
1
You can select positioning system to the 3rd point.
0: Relative travel, 1: Absolute travel
13
The 3rd
setting speed
0 to 4000 2000 You can set the speed moving to the 3rd
point. Setting unit [r/min]
14
The 3rd
acceleration time
1 to 30000 200 You can set time taken for reaching the 3rd
setting speed. Setting unit [ms]
15
The 3rd
deceleration time
1 to 30000 200 You can set time taken from the 3rd setting
speed to stop. Setting unit [ms]
16
The 3rd block
setting
0 to 2
0
0: Normal operation
1: Continuous block operation
(3rd point
→
4th point )
2: Combined block operation
(3rd point + 4th point )
17
The 3rd block
timer setting
0 to 30000 0
Enabled when you set Pr16 to “1”.
Start commanding of 4th point after this set-
ting time elapses and command of 3rd point
is completed. Enabled in unit of 2 ms.
Setting unit [ms]
18
The 4th point
The 4th target
position
(rotation number)
–16384 to
16383
0
Setting unit
[rotation
number]
You can set travel distance in
rotation numbers and pulses.
(288 pulses per rotation)
19
The 4th target
position (Pulse)
–288 to
288
0
Setting unit
[pulse]
1A
The 4th
coordinate setting
0,1
1
You can select positioning system to the 4th point.
0: Relative travel, 1: Absolute travel







































































