






















5.4.2
Commands
The Measuring Input technology object can be addressed in the user program using the
following commands:
Table 5-11
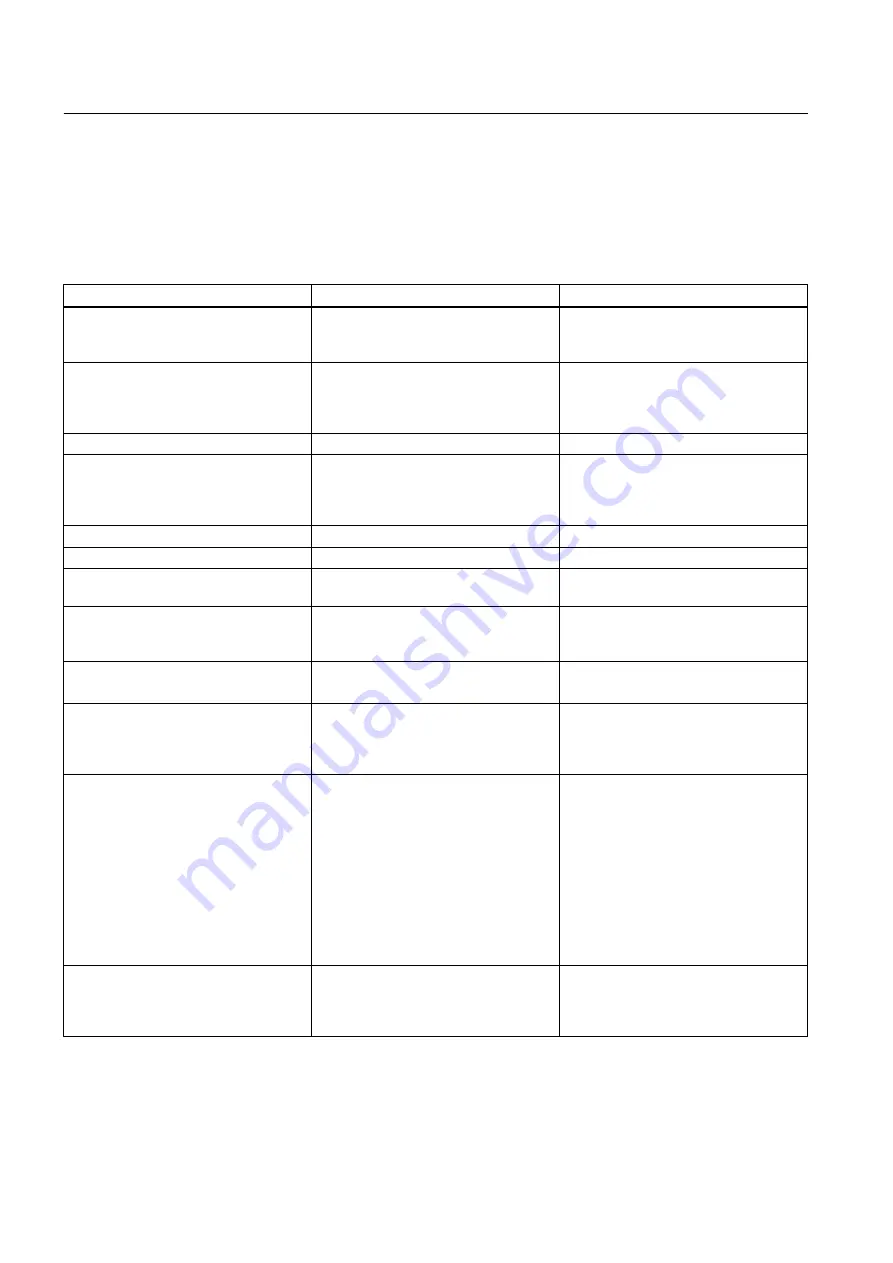
Measuring Input TO system functions
Commands
Description
Application
_enableMeasuringInput
Activate measurement job.
Measurement is activated. Measuring is
terminated after the measuring process
has been executed.
_enableMeasuringInputCyclic
(V3.2 and higher)
This function activates a cyclical
measurement job. The results of the last
measurement are displayed in the
system variables.
Cyclic measuring of axis/encoder
positions by activating a measurement
job once only
_disableMeasuringInput
Deactivate measurement job.
Measurement is terminated.
_enableMeasuringInputSimulation
Activates measuring input simulation.
Measured result arrived is set and
allocated to the programmed measured
value as a measured result.
Simulation of a program run using
default settings of programmed
measured values
_disableMeasuringInputSimulation
Deactivate simulation mode.
-
_resetMeasuringInput
Reset measuring input.
Create initial state of measuring input.
_resetMeasuringInputError
Reset error on measuring input.
E.g. acknowledge configuration errors
after entering correct values.
_resetMeasuringInputConfigDataBuffer This function clears the configuration
data collected in the buffer since the last
activation without activating them.
Changing configuration data in the RUN
state discards the accumulated
modifications.
_getMeasuringInputErrorNumberState
(V3.1 and higher)
Readout of error number status.
Check for occurrence of an error with
the specified error number
_getStateOfMeasuringInputCommand
(V3.2 and higher)
This function returns the execution state
of a command.
Check whether or not measurement has
already taken place (i.e. the command
ID is still available or has already been
deleted)
_bufferMeasuringInputCommandId
(V3.2 and higher)
This function enables commandId and
the associated command status to be
saved beyond the execution period of
the command.
The commandId parameter is used to
define the command for which the
respective status is to be saved. The
maximum number of saveable
command statuses is specified in the
decodingConfig.numberOfMaxBuffered
CommandId configuration data element.
Subsequent check of how command
was terminated (e.g. error-free or
number of error that occurred)
_removeBufferedMeasuringInputComm
andId
(V3.2 and higher)
This function ends the saving of
commandId and the associated
command status beyond the execution
period of the command.
Explicit deletion of previously saved
command IDs
For further information on the system functions, please refer to the
SIMOTION TP CAM
Reference Lists.
Measuring Input TO - Part III
5.4 Measuring Input technology object programming/references
Output Cams and Measuring Inputs
178
Function Manual, 04/2014







































































